 09111439770
09111439770

هر جرثقیل صنعتی بسته به کارکرد آن و توانایی حمل بار و نوع بار و مکانی که در آن استفاده می شود ، به یک سیستم کنترل منحصر به خود نیاز دارد .
مقدمه
در این مقاله ، مروری خواهیم داشت بر آخرین سیستم های کنترل جرثقیل که بین سال های 2000 تا 2016 ارائه شده است . سیستم های کنترلی تک پاندول و دو پاندول مورد بررسی قرار گرفته است . همچنین سیستم کنترلی Anti-sway که در بازار قابل خریداری است مورد بررسی قرار داده شده است .
معرفی
جرثقیل ها ماشین هایی هستند که جهت حمل بار از نقطه ای به نقطه دیگر مورد استفاده قرار می گیرند .
جرثقیل در کارخانجات مختلف ، صنعت ساختمان ، صنایع دریایی و اماکن بندری مورد استفاده فراوان قرار می گیرد .
جرثقیل انواع مختلفی دارد ؛ جرثقیل دروازه ای ، جرثقیل سقفی ، جرثقیل برجی و غیره . این جرثقیل ها بر اساس درجات آزادی که مکانیزم عملکرد در نقطه ی تعلیق ارائه می دهد طبقه بندی می شود .
مسائل مهم موجود در سیستم جرثقیل شامل توانایی کاهش نوسان محموله و انتقال آن به موقعیت مطلوب است .
برای انتقال مناسب بار به نقطه دلخواه ، نوسانات آن باید به حداقل برسد . حرکت جرثقیل مستعد انجام نوسانات بیش از حد است که می تواند بر دقت ، موقعیت و کیفیت آن اثر منفی بگذارد .
عدم کنترل زوایای نوسان منجر به مشکل در اتوماسیون سیستم توسط اپراتور ، همراه با آسیب های احتمالی به کیفیت بار یا محیط عملیاتی در اطراف محل کار خواهد شد . علاوه بر این به زمان بیشتری برای تکمیل کار نیاز است و ممکن است باعث کاهش سطح تولید و هدررفت انرژی شود .
جرثقیل ها را به چندین روش می توان کنترل کرد ؛ بلند کردن ، حمل بار سپس پایین آوردن بار . ضریب میرایی سیستم بسیار مهم است ؛ استفاده از انواع دمپرها باعث کنترل میرایی سیستم می شود .
تمرکز این مقاله ، بر استفاده از کنترل هوشمند در سیستم جرثقیل است . تکنیک هایی برای کاهش نوسانات جرثقیل توسط فنر شعاعی و دمپر و کابل سیستم دمپر غیر فعال پیشنهاد شده است . از طرف دیگر رویکردهای فعالی مثل فیدبک و فیدفوروارد هستند که می توان از آنها بهره برد .
انواع جرثقیل و کنترل آن ها
از انواع مختلف جرثقیل ها در صنایع متنوع استفاده شده است. این شامل جرثقیل های پل، جرثقیل های دروازه ای، جرثقیل های برجی (چرخشی) و جرثقیل های بومی است. بهطور کلی، این جرثقیل ها میتوانند به دو گروه دستهبندی شوند، بر اساس ساختارها و حرکتهای آنها: (1) جرثقیل های پل و جرثقیل های دروازه ای ، (2) جرثقیل های برجی و جرثقیل های بوم . ساختارهای این جرثقیل ها در شکل ۱ نمایش داده شده است. یک جرثقیل پل، همچنین به عنوان یک جرثقیل سقفی شناخته میشود که بر روی یک سیستم ترتیب حرکت بالا، در طول یک خط تولید یا طول کارخانه عمل میکند. عموما ، دارای سه درجه آزادی (DOF) یا حرکت قلاب در جهتهای X، Y و Z است. ترولی میتواند در جهت راست و چپ در امتداد میزان حرکت کند. از سوی دیگر، تیرک ها بر روی یک پل به صورت ارتجاعی نصب شده است و این باعث حرکتهای جلو و عقب میشود. علاوه بر این، قلاب میتواند بالا و پایین حرکت کرده و بار را عمودی قرار دهد.
یکی از تفاوت های بین جرثقیل های برجی و جرثقیل دروازه ای در این است که جرثقیل برجی حرکت 180 درجه تا 360 درجه دارد ؛ اما جرثقیل دروازه ای بصورت حرکت رفت و برگشت عمل می کند . هدف اصلی در کنترل یک سیستم جرثقیل ، دستیابی به موقعیت ترولی و از بین بردن نوسان بار است . زوایا به گونه ای باشد که بتوان بار را در حداقل زمان با نوسان کمتر یا بدون نوسان به مقصد رساند . برای کار با جرثقیل به یک اپراتور ماهر نیاز است ، زیرا حرکتی مشابه آونگ دارد و احتمال دارد آزادانه نوسان کند .
اپراتور ممکن است نیاز به کاهش سرعت و جبرا مانورهای جرثقیل داشته باشد تا نوسانات بار را که ممکن است عملکرد جرثقیل را مختل کند کاهش دهد . اگر نوسانات شدید رخ دهد ، عملیات باید تا زمانیکه نوسان پایان یابد ، متوقف شود . علاوه بر این ، عملکرد بالابر جرثقیل نیز یکی از چالش هایی است که اپراتور جرثقیل با آن مواجه است .
جرثقیل ها به دلیل نوسانات بار و حرکت افقی جرثقیل ، مشکل پایداری دارند . روابط بین ترولی و نوسانات محموله غیرخطی بوده و به یکدیگر وابسته اند . علاوه بر این وجود اختلالات خارجی مانند باد و جود عدم قطعیت نیز ممکن است عملکرد جرثقیل را مختل کند .عدم قطعیت معمولا شامل یک اصطکاک ناشناخته ، جرم استراکچر ، جرم بار و طول کابل است .

شکل 2. جرثقیل های آزمایشگاهی در دانشکده مهندسی برق، دانشگاه تکنولوژی مالزی: (الف) جرثقیل سقفی. (ب) تاور کرین
از آنجایی که جرثقیل ها معمولاً به آرامی میرا می شوند، هر حرکت گذرا مدت زیادی طول می کشد تا از بین برود. علاوه بر این، انطباق کابل، قلاب و مجموعه محموله، همگی در پویایی سیستم پیچیده نقش دارند. . زوایای نوسان یا نوسانات بار را می توان به دو جزء طولی (زاویه درون صفحه) و جانبی (زاویه خارج از صفحه) طبقه بندی کرد.
علاوه بر این، یکی دیگر از دلایل مهم برای داشتن یک سیستم کنترل جرثقیل موثر، اطمینان از عملکرد ایمن جرثقیل است. جرثقیل ها در یک سوم از کل تلفات و جراحات ساخت و ساز و تعمیر و نگهداری که منجر به ناتوانی دائمی می شود، نقش دارند. یکی از حوادث بزرگ در مکه، عربستان سعودی در 11 سپتامبر 2015 اتفاق افتاد . این حادثه چند روز مانده به موسم حج در مسجد الحرام عربستان رخ داد که در آن 107 نفر جان باختند و بیش از 230 نفر مجروح شدند. مطالعه Rishmawi در مورد تصادفات جرثقیل بین ژانویه 2011 تا اکتبر 2015 نشان داد که دلیل اصلی حادثه ،واژگونی جرثقیل بوده است. یکی دیگر از دلایل این تلفات زیاد این بود که عده ای توسط محموله های متحرک مورد اصابت قرار گرفتند . هر دو دلیل حادثه می تواند به نوسانات محموله مربوط باشد، و باعث واژگونی آن می شود. علاوه بر این، هنگامی که محموله ها از روی زمین بلند می شوند، می توانند به طرفین تاب بخورند و به مردم ضربه بزنند.
در مورد یک جسم بزرگ، به جای استفاده از یک آونگ معمولی با یک بار توده ای نقطه ای، از یک آونگ دوگانه با بار جرمی توزیع شده استفاده می شود . برای آزمایش اثربخشی کنترل کننده پیشنهادی یک جرثقیل پل صنعتی 10 تنی با باری باریک و مستطیل شکل استفاده شد که در شکل 3 نشان داده شده است. یک جرثقیل پل مقیاس کوچک با یک جسم بزرگ که توسط قلاب آویزان شده بود با چهار کابل نگهدارنده متصل به آن همانطور که در شکل 4 نشان داده شده است استفاده شد. به دلیل پیچش محموله و کابل ، این مشکل باید کنترل و مهار شود . از این رو، استراتژی کنترلی که برای این ویژگی طراحی میشود، چالشبرانگیزتر و پیچیدهتر میشود، زیرا باید شامل نوسان بار و کنترل کننده های پیچشی باشد.
مدل سازی
در این مقاله، مدلسازی به دو نوع جرثقیل تک پاندول و دو پاندول تقسیم میشود. از آنجا که تمرکز بر روی استراتژیهای کنترل است، یک بررسی مختصر از مدلسازی سیستمهای جرثقیل در طول سالهای ۲۰۰۰ تا ۲۰۱۶ ارائه شده است. تا کنون اکثر مقالات مروری ، بر روی جرثقیل های تک پاندول متمرکز بوده است و کار برجسته ای بر روی سیستم جرثقیل دو پاندول انجام نگرفته است . 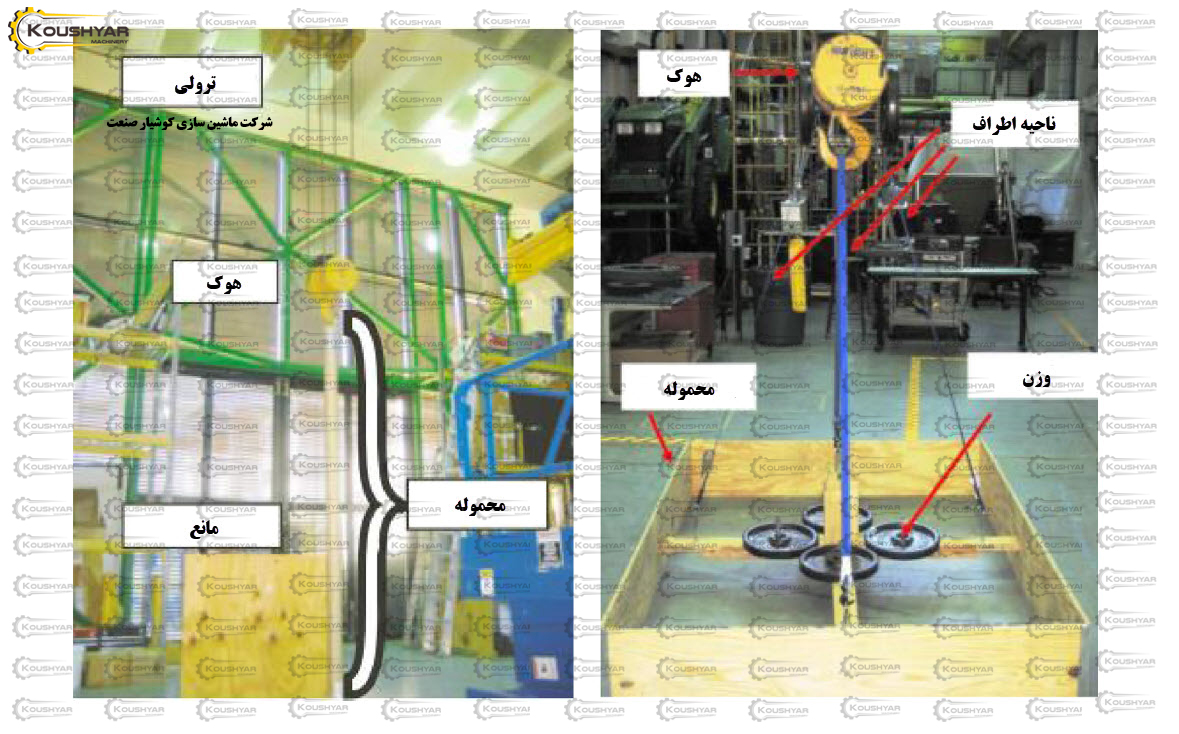 در تصاویر بالا سیستم دو پاندول با بار توزیع شده مورد آزمون قرار گرفته است . در تصویر سمت چپ محموله باریک مورد آزمون قرار گرفته شده و در تصویر سمت راست یک بار با شکل هندسی مستطیلی آزمایش شده است .
در تصاویر بالا سیستم دو پاندول با بار توزیع شده مورد آزمون قرار گرفته است . در تصویر سمت چپ محموله باریک مورد آزمون قرار گرفته شده و در تصویر سمت راست یک بار با شکل هندسی مستطیلی آزمایش شده است .
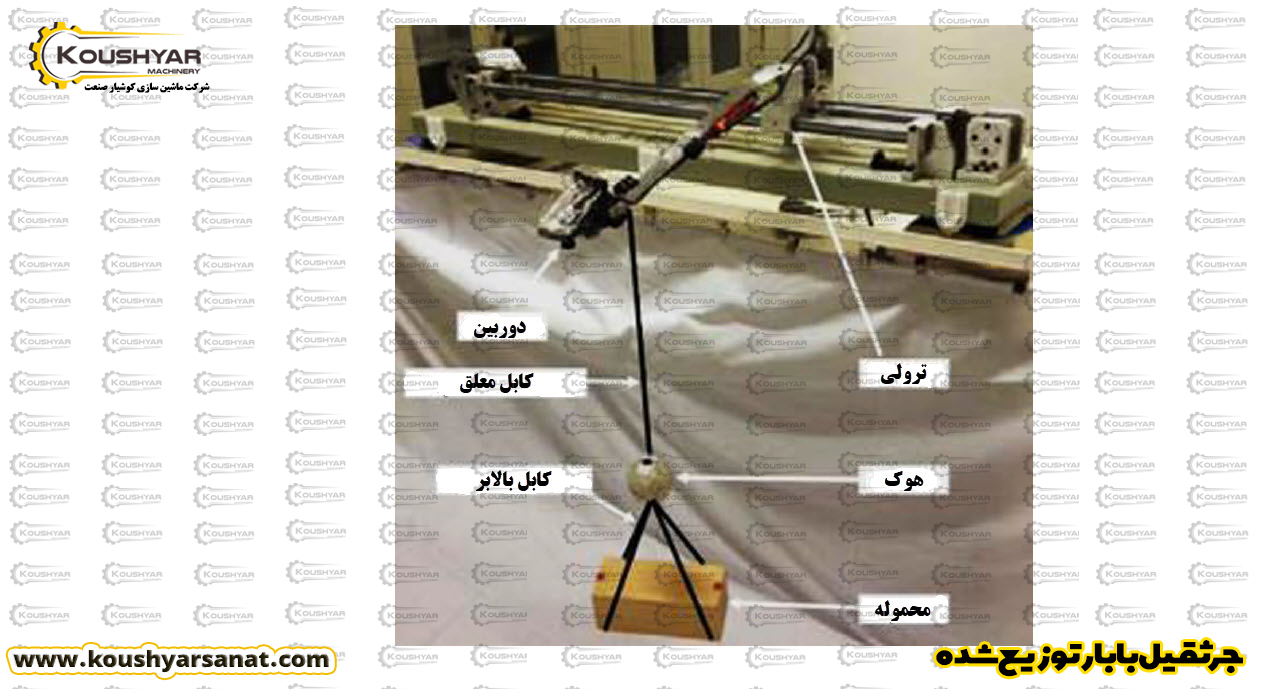 در تصویر بالا یک نمونه آزمایشگاهی جرثقیل تک پاندول با بار توزیع شده را مشاهده می کنید .
در تصویر بالا یک نمونه آزمایشگاهی جرثقیل تک پاندول با بار توزیع شده را مشاهده می کنید .
سیستم جرثقیل تک پاندول :
چند مدل ریاضی مختلف برای جرثقیلهای مختلف توسط پژوهشگران طراحی شده است، و بیشتر رویکردها بر اساس روشهای جمعآوری جرم بودهاند.
این مدل شامل مدلسازی یک جرثقیل کانتینر ، مدلسازی یک جرثقیل دروازه ای با استفاده از روش لاگرانژی ، و مدلسازی یک جرثقیل هیدرولیک ساحلی با استفاده از رویکرد نمودار باند میشود.
برای یک جرثقیل بالابری ، مدلسازی با استفاده از رویکرد لاگرانژ ، تاکاگی-سوگنو و دیگر رویکردها انجام شد. در یک روش مدلسازی ، یک طرح جرثقیل سه بعدی (3D) ارائه شد که اجازه توصیف جریان انرژی را میدهد. از سوی دیگر، یک جرثقیل چرخشی نیز با استفاده از چندین رویکرد مدلسازی شد.
در اینجا تکنیک نمودار باند ، تجزیه و تحلیل المان محدود ، روشهای لاگرانژ ، و یک مدل تحلیل مبتنی بر کامپیوتر از جمله مطالعات انجام شده است. در یک مطالعه دیگر ، تجسم المان محدود همچنین برای مدل سازی جرثقیل بوم استفاده شد. برای به دست آوردن یک مدل دینامیک دقیقتر که سیستمهای جرثقیل را نمایندگی میکند، چندین پژوهشگر در زمان ساخت مدلهای دینامیک خود، چندین پارامتر دیگر را در نظر گرفته و اضافه کردهاند.
در یک پژوهش ، انعطافپذیری و میرایی سازه فلزی حامل بار ، همچنین اصطکاک در بلبرینگ اصلی و مقاومت هوا برای مدلسازی یک جرثقیل دروازه ای مورد بررسی قرار گرفت ؛ نتایج خوبی از این مطالعه مشاهده شد.
چندین پژوهشگر ، طول متغیر کابل را در مدلی که شبیهسازی کشش بار را انجام میدهد، مدنظر قرار دادند. در یک مطالعه دیگر ، یک مدل کامل شامل یک راننده و یک موتور سیستم با استفاده از معادلات پویا و ابزار دقیق در نرم افزار MATLAB ارائه شد. مدل با موفقیت بر روی یک جرثقیل صنعتی 10 تنی آزمایش شد.
سیستم جرثقیل دو پاندول :
برای سیستمهای جرثقیل دو پاندول ، در پژوهش مشخص شد که اولین انتشار برای جرثقیل دروازه ای در سال 1998 بود، جرثقیل بالابر در سال 2004 ، جرثقیل پل در سال 2006 ، جرثقیل برجی در سال 2007 و جرثقیل بازویی در سال 2009 به چاپ رسید.
از آن زمان تا کنون، مقالات زیادی منتشر شده اند که شامل مدلسازی جرثقیل پل و جرثقیلهای بالابر ، جرثقیل برجی و جرثقیل بوم میشوند. در اکثر کارها، روش لاگرانژ برای مدلسازی جرثقیلها به کار گرفته شده و برای طراحی کنترلکننده استفاده شد.
این روش شامل یافتن انرژیهای جنبشی و پتانسیلی سیستم و حل معادله لاگرانژ برای به دست آوردن معادلات ریاضی که توصیف کننده ی سیستم هستند، میشود.علاوه بر این ، روش kane هم برای مدلسازی یک جرثقیل پل استفاده شد.
در این مقاله، یک فرمول کوتاه برای مدلسازی یک جرثقیل بالابر با استفاده از روش لاگرانژی ارائه شده است.
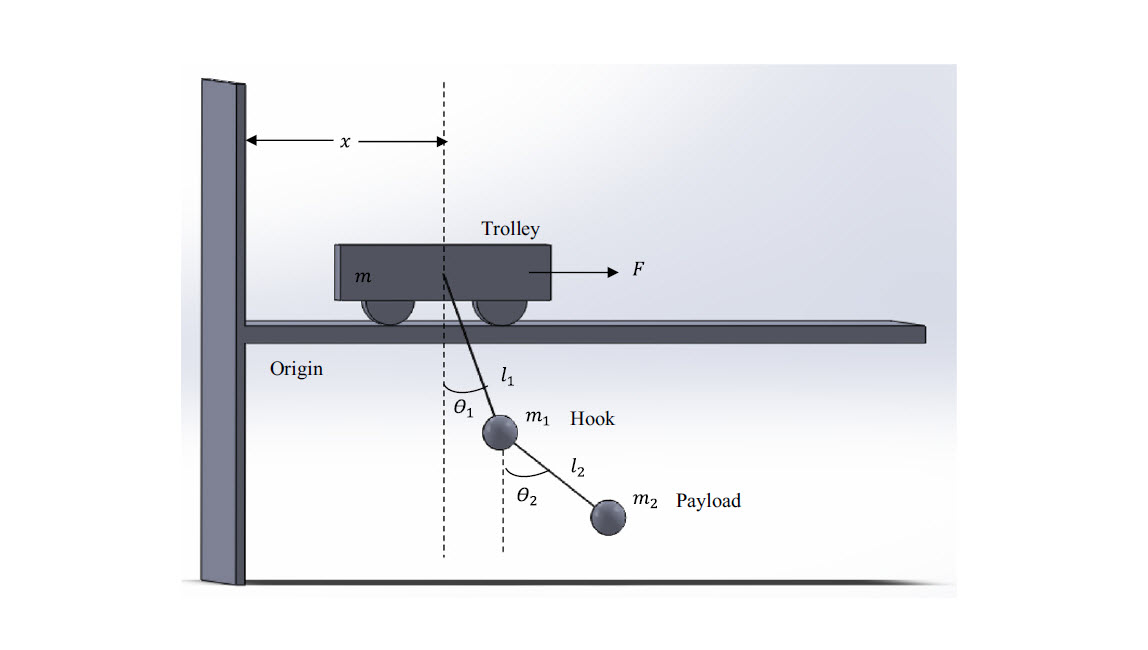
یک تصویر شماتیک از یک سیستم جرثقیل بالابر دو پاندول در شکل زیر نشان داده شده است.
جرثقیل از سه متغیر مستقل تشکیل شده است ؛ موقعیت ترولی که با ایکس نشان داده می شود . زاویه ی هوک که با تتا یک نمایش داده می شود و زاویه ی محموله ( بار ) که با تتا دو نشان داده می شود .
m نماینده ی جرم ترولی است ؛ m1 نشان دهنده ی جرم هوک ، m2 نمایشگر جرم محموله ، l1 نشان دهنده ی طول کابل بین ترولی و هوک ، l2 نشانگر طول کابل بین هوک و محموله می باشد .
F نشان دهنده ی نیروی خارجی وارد بر جرثقیل است . معادله ی لاگرانژ نسبت به مختصات qi برابر است با :
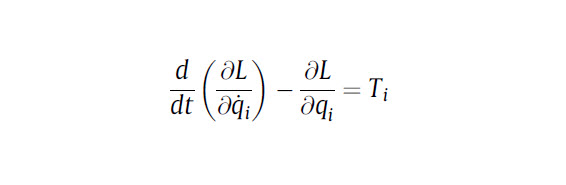
در اینجا L، qi (i = 1، 2، 3) و Ti نمایانگر تابع لاگرانژ، مختصات تعمیم یافته (q1، q2 و q3 به ترتیب x، h1 و h2 را نشان می دهند) و یک نیروی غیر محافظتی میباشد. با یافتن انرژی سینتیک و پتانسیل سیستم، تابع لاگرانژ به شکل زیر قابل نوشتن است.
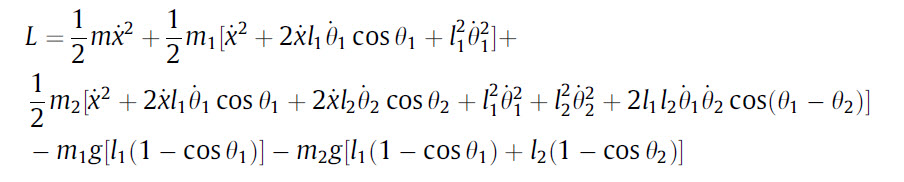
g شتاب گرانشی است . با تفریق دستور معادله (2) (معادله ی بالا ) و به دست آوردن اصطلاحات مانند معادله (1) (معادله بالاتر ) ، مدل دینامیک سیستم جرثقیل بالابر دوگانه می تواند به دست آید.

طرح های کنترل برای جرثقیل
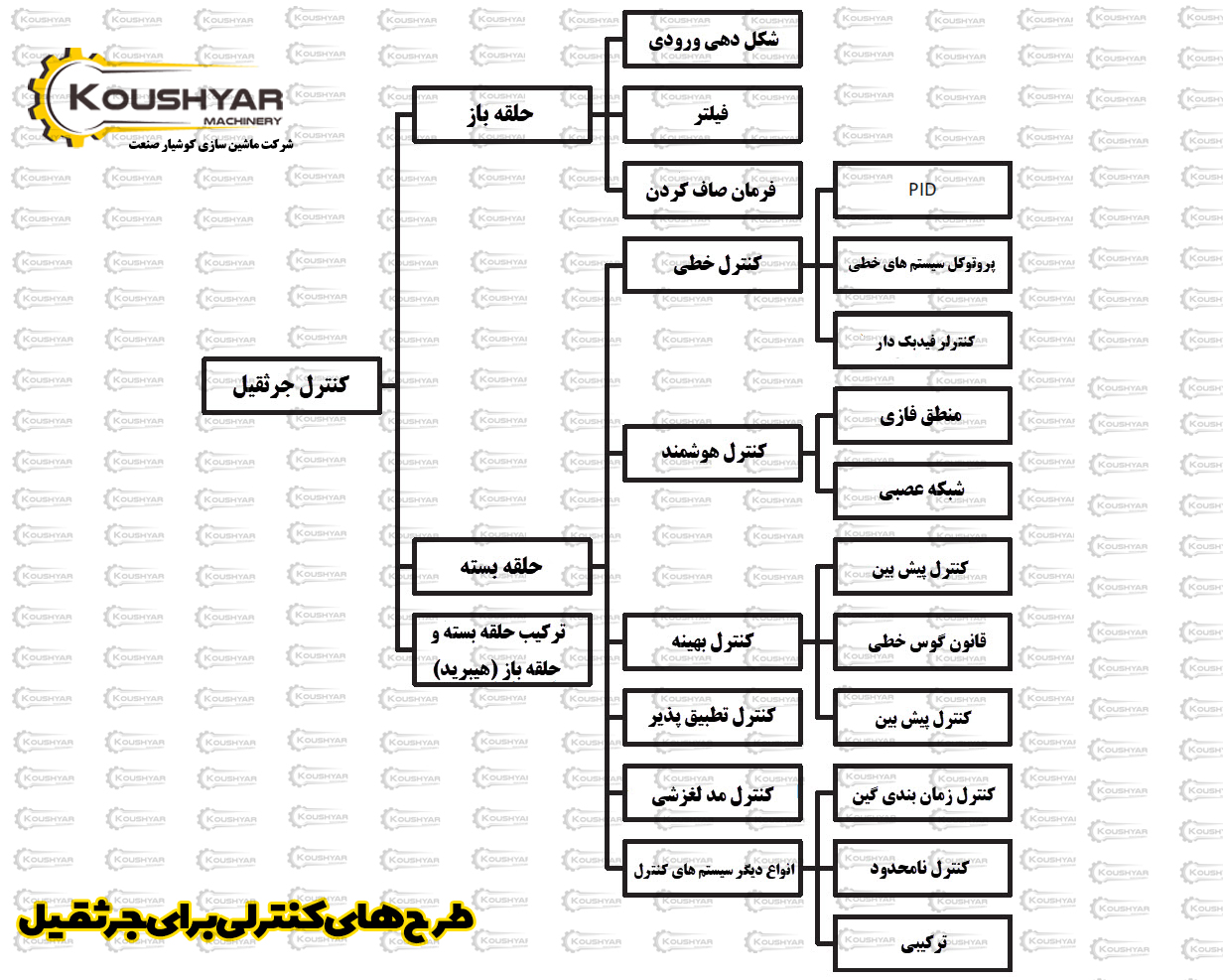
برای غلبه بر اشکالات کنترل مورد بحث، بسیاری از محققان راهحلها را با توسعه چندین طرح کنترل برای یک سیستم جرثقیل ارائه کردهاند. طرحهای کنترل توسعه یافته میتوانند اصولاً در دو دسته اصلی طرحهای حلقه باز و حلقه بسته تقسیم شوند. علاوه بر این، یک کنترلر بر اساس ترکیبی از تکنیک حلقه باز و حلقه بسته نیز پیشنهاد شده است. در این بخش، کنترلگرها بر اساس این دستهبندیها بررسی و بحث شدهاند و بر اساس انواع تکنیکهای کنترل، که در شکل بالا نشان داده شدهاند، تقسیم بندی شدهاند. علاوه بر این، یک زیربخش مربوط به بررسی تکنیکهای کنترل برای کمک به اپراتورهای انسانی و جلوگیری از واژگونی جرثقیل نیز درج شده است. توجه داشته باشید که طراحی کنترلگرها و اشتقاق معادلات آنها در محدوده این مقاله نیست.
1. طرحهای کنترل حلقه باز
طرحهای کنترل حلقه باز بطور گسترده توسط پژوهشگران مختلف بهطور عمده برای کنترل لرزش بار مورد استفاده قرار گرفتهاند.
طرحهای کنترل باز از قابلیت اجرایی و پیاده سازی خوبی برخوردارند ، زیرا نیازی به سنسورهای اضافی برای اندازهگیری زوایای لرزش وجود ندارد و این بدون شک در کاهش هزینهها تاثیر دارد .
با این حال ، این نوع تکنیک دارای عیب بزرگی است که حساس به اختلالات خارجی است . یک مثال از یک مزاحمت خارجی که همیشه بر عملکرد یک جرثقیل تاثیر میگذارد، باد یا موج دریا برای یک جرثقیل است که بر روی کشتیها استفاده میشود.
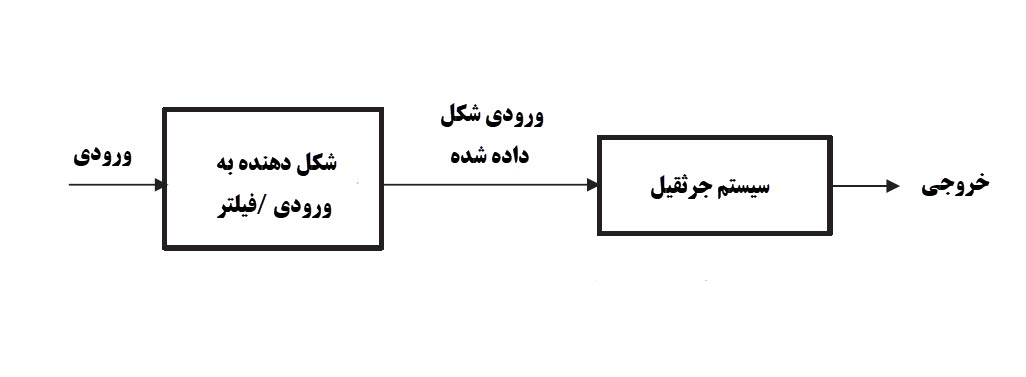
برای تکنیک کنترل حلقه باز، ورودی کنترل معمولاً تغییرات سیستم را در نظر نمیگیرد. در این مقاله، سه تکنیک اصلی کنترل حلقه باز، به نامهای شکل دهی ورودی، فیلتر کردن و صاف کردن فرمان، مورد بررسی قرار گرفتهاند. شکل بالا نمایی از یک دیاگرام بلوک برای اجرای استراتژیهای کنترل حلقه باز برای سیستمهای جرثقیل را نشان میدهد.
1.1 شکلدهی ورودی
شکلدهی ورودی یکی از تکنیکهای حلقه باز است که میتوان آن را در زمان مناسب بهکار برد. این تکنیک بهطور گستردهای توسط بسیاری از محققان برای کنترل پیشخور مؤثر در کاهش حرکات ناشی از لرزشها یا نوسانات سازههای انعطافپذیر مانند جرثقیلها مورد استفاده قرار گرفته است. یک بررسی دقیق در مورد کنترل سازههای انعطافپذیر با استفاده از شکلدهی فرمان ارائه شده است.
کنترل جرثقیل ضد نوسان ( anti-swing ) به وسیله شکلدهی ورودی در مقالات جدید به طور گستردهای پیادهسازی شده است. با استفاده از این تکنیک، ارتعاشات سیستم از طریق همپوشانی سیگنال ورودی فرمان با دنبالهای از ضربات که بر اساس فرکانسهای طبیعی و نسبتهای کاهش ارتعاش سیستم طراحی شدهاند، کاهش مییابد.
برای جرثقیلهای دروازه ای ، پیادهسازی شکلدهی ورودی برای کنترل نوسان در مقالات زیادی پیشنهاد شده است. از سوی دیگر، پیادهسازیها برای جرثقیلهای سقفی شامل شکلدهی ورودی بدون لرزش (ZV) و شکلدهی ورودی بدون لرزش با مشتق گیر (ZVD) ، شکلدهی ورودی بدون لرزش مشتق-مشتق-مشتق (ZVDDD) برای جرثقیلهای پل ، جرثقیلهای کانتینری ، جرثقیلهای بوم و پنوماتیک و برای جرثقیلهای چرخشی در این مقالات آمده است .
تکنیک شکلدهی ورودی عمدتاً بر اساس تجزیه و تحلیل خطی یا سیستم خطی است. بر خلاف یک جرثقیل پل که رفتار خطی دارد، یک جرثقیل برج به طور ذاتی دارای رفتار غیرخطی است، به دلیل حرکت چرخشی برج زمانی که حرکتی کاملاً شعاعی در نظر گرفته میشود، جرثقیل برج دارای دینامیک خطی است. با این حال، در عمل، جرثقیل برج شامل حرکات شعاعی و چرخشی همزمان است که نوسانات بار را در حرکات شعاعی و مماسی القا میکند. رفتار غیرخطی حرکات شامل اجزای چرخشی با سرعت متوسط تا بالا است. بنابراین، برای بهبود روش شکلدهی ورودی، ضروری است که این روش به نحوی تنظیم شود که بتواند غیرخطیهایی که با حرکت چرخشی سیستم جرثقیل برج مرتبط است را در نظر بگیرد.
شکلدهی ورودی نشان داده است که برای غیرخطیهایی که تأثیر نسبتا کمی بر روی دینامیک کلی سیستم دارند، بهطور مؤثری کار میکند. تأثیرات غیرخطی برای جرثقیلهای برج که با حرکت چرخشی سروکار دارند، بیشتر است. برای مقابله با این مسئله، واهان و همکاران موفق به ارائه یک الگوریتم شکلدهی فرمان جدید شدند تا برای غیرخطیها که به اثرات دینامیکی متغیر ناشی از حرکت چرخشی جرثقیل برج مقاومتر باشد، سازگار شوند. نویسندگان ، یک شکلدهنده ورودی چندحالتی با حساسیت مشخص را معرفی کردند که با استفاده از تکنیکی، دو فرکانسی را که به تغییرات در دو حالت مقاوم بودند، سرکوب کرده است. توجه داشته باشید که میتوان با سرکوب لرزش در برخی نقاط نزدیک به فرکانسهای مدلسازی، مقاومت بهدست آورد. بنابراین، از طریق این روش، طراح میتواند دامنه فرکانسی را که لرزش در آن سرکوب میشود، مشخص کند. الگوریتم کنترل پیشنهادی همچنین برای مقاومت آن با تغییر طول کابل آزمایش شد. روش دیگری که برای مقابله با لرزشی که به خاطر حرکات شعاعی و مماسی جرثقیل برج ایجاد میشود، مطرح شده، اجرای حرکت شعاعی از شکلدهندههای فرمان کمککننده است. علاوه بر این، این روش میتواند بر روی انواع دیگر جرثقیلها بهدلیل رفتار غیرخطی آنها، مانند جرثقیلهای بازویی که دارای مفاصل چرخشی هستند، نیز پیادهسازی شود.
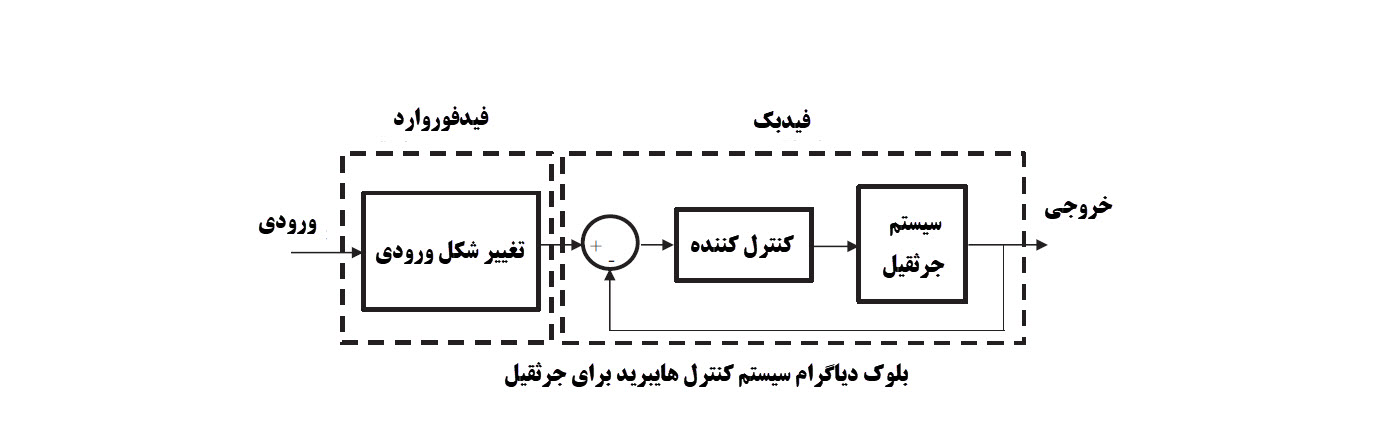
تکنیک حلقه باز که توسط شکلدهی ورودی ارائه میشود، به اختلالات خارجی و همچنین به تغییرات پارامترها حساس است. علاوه بر این، این روش به فرکانس نوسانات نیز حساس است. همچنین، با استفاده از شکلدهی ورودی، زاویه نوسان اولیه باید صفر باشد، در غیر این صورت ممکن است باعث تشدید نوسانات در بار شود. با وجود این معایب، شکلدهی ورودی بهعنوان یک روش کمهزینه در نظر گرفته میشود، زیرا نیازی به سنسورهای اضافی برای اندازهگیری نوسانات بار ندارد و همچنین پیادهسازی آن آسان است. برخی تلاشها برای ترکیب چندین طرح کنترل فیدبک با یک شکلدهنده ورودی پیشنهاد شده است. این ترکیب به کنترلکننده این امکان را میدهد که به سه روش مختلف عمل کند: (1) یک طرح فیدبکی که بهطور مؤثر موقعیت چرخ را کنترل میکند؛ (2) یک طرح فیدبکی که همچنین میتواند اختلالات را تشخیص داده و رد کند؛ و (3) یک شکلدهی ورودی که برای سرکوب نوسانات بار استفاده میشود. شکل زیر یک نمودار بلوکی از یک استراتژی کنترل ترکیبی برای سیستم جرثقیل را نشان میدهد. مسعود و همکاران در مقاله ای یک شکلدهنده دستوری ترکیبی طراحی کردند که فرمان های شتاب را برای سرکوب نوسانات صفر و باقیمانده یک جرثقیل دوپاندولی تولید میکند. آزمون در یک جرثقیل بالابر آزمایشگاهی نشان داد که نوسانات باقیمانده بهطور قابلتوجهی کاهش یافته است. بهتازگی، یک ترکیب از شکلدهی ورودی و کنترل فیدبکی برای یک سیستم دوپاندولی که میتوان آن را در سیستم جرثقیل اعمال کرد، پیشنهاد شده است. هوانگ و همکاران در مقاله ای یک ترکیب از شکلدهی دستوری و کنترل فیدبکی را برای حذف نوسانات بار و کاهش اثر طوفانهای بادی در یک جرثقیل متحرک ارائه دادند. نتایج شبیهسازی و آزمایش نشان داد که کنترلکنندههای پیشنهادی مقاوم بوده و میتوانند ترکیبهای مختلف حرکات محرکه و اختلالات بادی را کاهش دهند.
تعدادی دیگر از روشهای شکلدهی که بر اساس توالی محرک نیستند نیز ارائه شدهاند. این روشها شامل تکنیک شکلدهی ورودی با استفاده از سرعت خروجی سیستم ، شکلدهی ورودی با تابع پیوسته ، شکلدهی ورودی با مدولاسیون فرکانس و شکلدهی ورودی با تأخیر توزیع شده است. بهتازگی، شکلدهی ورودی طراحی شده است که میتواند باربرداری در یک سیستم جرثقیل 3D را با استفاده از خروجی سیستم مدیریت کند.
1.2 شکلدهی ورودی تطبیقی
به طور کلی، بیشتر شکل دهی های ورودی متعارف که در بخش قبلی بحث شد، بر اساس پارامترهای ثابت سیستم طراحی شدهاند. بنابراین، در مورد سیستمهای متغیر زمانی یا سیستمهایی با عدم قطعیت در پارامترها، مانند عملیات جرثقیل با بار برداری، که در آن فرکانسهای طبیعی و نسبتهای میرایی سیستم تغییر میکنند، به شکل دهی ورودی که بتواند به این تغییرات سازگار شود، نیاز است. در مقاله ، این به عنوان شکلدهی ورودی سازگار شناخته میشود. تکنیکها عمدتاً بر اساس سازگاری فرکانسهای طبیعی و نسبتهای میرایی استوار هستند، به منظور بهروزرسانی مقادیر و مکانهای ضربات شکل دهی های ورودی.
در تلاشی برای مقابله با اثرات حمل بار و عدمقطعیتهای پارامترها در سیستمهای جرثقیل، شبیهسازهای ورودی تطبیقی توسعه یافتهاند. کتفورث و پائو در مقاله ای یک شبیهسازی ورودی تطبیقی مبتنی بر تغییرات فرکانسهای حالت انعطافپذیر ارائه دادند تا به عدمقطعیتهای پارامترها رسیدگی کنند. علاوه بر این، تحقیقاتی در زمینه کنترلهای گسسته زمانی تطبیقی انجام شده است که در آن دامنه و نقاط وارد کردن تکانهها بهروزرسانی میشود تا با عدمقطعیتهای سیستم سازگاری یابد . در مقاله دیگری پیشنهاد شده است که یک شکلدهی فرمان تطبیقی در حوزه زمان با استفاده از یک روش مستقیم ارائه شود، که در آن ضرایب شکلدهنده فرمان موردنظر میتواند بهطور مستقیم تخمین زده شود، بدون اینکه نیازی به اطلاعات پارامترهای سیستم باشد. در پژوهشی دیگر، نویسنده یک شکلدهی فرمان با تأخیر زمانی تطبیقی برای سیستمهای تکحالته و چند حالته پیشنهاد کرد.
برای کنترل اثر بلند کردن، سینگوز و همکاران طراحی شکلدهی ورودی را با استفاده از رویکرد طول سفر متوسط برای جرثقیلهای دروازهای مورد بررسی قرار دادهاند. سایر تحقیقات شامل شکلدهی ورودی تطبیقی برای جرثقیلهای سهبعدی ، شکلدهی ورودی تطبیقی برای جرثقیلهای بالابری ، الگوریتم تطبیقی شکلدهی ورودی برای جرم و طول کابل متغیر و شکلدهی ورودی تطبیقی اصلاحشده میباشد.
1.3 فیلترها
چندین فیلتر، از جمله فیلتر پاسخ ضربه بینهایت (IIR) و فیلتر پاسخ ضربه محدود (FIR)، برای کنترل نوسان بار جرثقیل بررسی شدهاند. نشان داده شده است که فیلترهای IIR فاقد فاز دقیق هستند و معمولاً کنترل آنها دشوار است، در حالی که فیلترهای FIR همیشه دارای فاز خطی هستند و کنترل آنها آسان است. برخی از تحقیقات مرتبط با فیلترهای IIR برای کنترل جرثقیلهای بالابر ، جرثقیلهای دروازهای و جرثقیلهای چرخشی پیادهسازی شده است. از سوی دیگر، فیلتر FIR برای یک جرثقیل چرخشی ، جرثقیل دروازهایی و جرثقیل بازویی طراحی شده است. مطالعات دیگری شامل کنترل پیگیری با استفاده از فیدفوروارد چند ورودی-چند خروجی (MIMO) FIR و شکلدهی ورودی با استفاده از فیلتر FIR بوده است.
برخی از فیلترها از جمله فیلتر پاسخ بینهایت (IIR) و فیلتر پاسخ محدود (FIR) برای کنترل نوسانات بار جرثقیل بررسی شدهاند. نشان داده شده که فیلترهای IIR فاقد فاز دقیق هستند و معمولاً کنترل آنها دشوار است، در حالی که فیلترهای FIR همیشه دارای فاز خطی هستند و کنترل آنها آسانتر است. برخی از تحقیقات مربوط به فیلترهای IIR برای کنترل جرثقیلهای بالابری ، جرثقیلهای دروازهای و جرثقیلهای چرخشی انجام شده است. از طرف دیگر، فیلتر FIR برای یک جرثقیل چرخشی ، یک جرثقیل دروازهای و یک جرثقیل بوم طراحی شده است. مطالعات دیگری نیز شامل یک فیلتر FIR پیشبین چند ورودی چند خروجی (MIMO) برای کنترل پیگیری و شکلدهی ورودی با استفاده از یک فیلتر FIR بوده است.
1.4 فرمان هموار سازی
فرمان هموار سازی یا صاف کردن یک استراتژی کنترل است که میتواند بهطور قابلتوجهی لرزشها را با صاف کردن فرمان اصلی کاهش دهد . صاف کردن با تخمین فرکانس طبیعی سیستم و نسبت میرایی طراحی شده است. چندین پروفایل هموار سازی فرمان وجود دارد که برای کاهش لرزشها و نوسانات استفاده شدهاند، از جمله منحنی S، تابع انتقال مثلثاتی، تابع گاوسی، تابع اسپلاین و چندجملهای کمر. بر اساس تحقیقات زو و همکاران ، روش هموار سازی فرمان پیشنهادی نسبت به خطای مدلسازی در دامنه فرکانس بالا حساسیته کمتری نسبت به ZVDDD که در دامنه فرکانس پایین حساس نیست، نشان داد. این روش بر روی سیستمهای جرثقیل با پاندول تکگانه و دوگانه آزمایش و تأیید شده است. هموار کننده طراحی شده همچنین نشان داده است که میتواند در یک سیستم چند حالته برای کاهش لرزش بهطور موفق عمل کند. با این حال، هموار کننده تنها میتواند به منظور کاهش نوسانات طبق واکنش مورد نظر که توسط یک اپراتور انسانی دستور داده میشود، عمل کند. علاوه بر این، قادر به حذف اختلالات خارجی نیز نبود.
در مقاله دیگری ، از تکنیک هموارسازی فرمان برای کاهش نوسانات جرثقیل پل که از یک دو پاندول استفاده میکند و بار توزیعشدهای به آن متصل است، بهره گرفته شد. این ویژگی دارای یک زاویه پیچش اضافی است که باید کنترل شود و حول کابلهایی که به قلاب متصل هستند، میچرخد. همواری robust طراحیشده ترکیبی از فیلتر کمگذر و فیلتر چند شیار بود که قادر به حذف فرکانسهای مد اول و دوم نوسانات بار بود. مشخص شد که با کاهش زوایای نوسانات بار، کاهش قابل توجهی در زاویه پیچش حاصل میشود. اخیراً، تکنیک هموارسازی فرمان با فرمان رد باد ترکیب شد تا نوسانات ناشی از اپراتور را کاهش دهد و اختلالات باد را در جرثقیل پل با بار توزیعشده رد کند . اثربخشی ساختار کنترل ترکیبی در یک جرثقیل پل آزمایشگاهی تأیید شد. مقایسهای جامع از تابع گام شکلدار ورودی و همواری فرمان با استفاده از منحنی S برای کاهش زوایای نوسانات بار در سیستم جرثقیل برج قابل حمل انجام شد . نتایج نشان داد که روش تابع گام شکلدار ورودی در کاهش نوسانات و لرزشها مؤثرتر از همواری فرمان بود. علاوه بر این ، پروفایلهای شکلدار ورودی نشان دادند که در برابر خطاهای مدلسازی مقاوم هستند و قادرند سیستم را سریعتر از فرمان منحنی S حرکت دهند. در کار دیگری، آلغانیم و همکاران تکنیکی برای تولید یک پروفایل شتاب شکلدار بهینه در زمان گسسته برای مانورهای همزمان حرکت و بالابری جرثقیل overhead پیشنهاد کردند. عملکرد موفق این تکنیک با استفاده از یک مدل مقیاسشده از جرثقیل overhead تأیید شد.
2.4 سیستمهای کنترل حلقه بسته
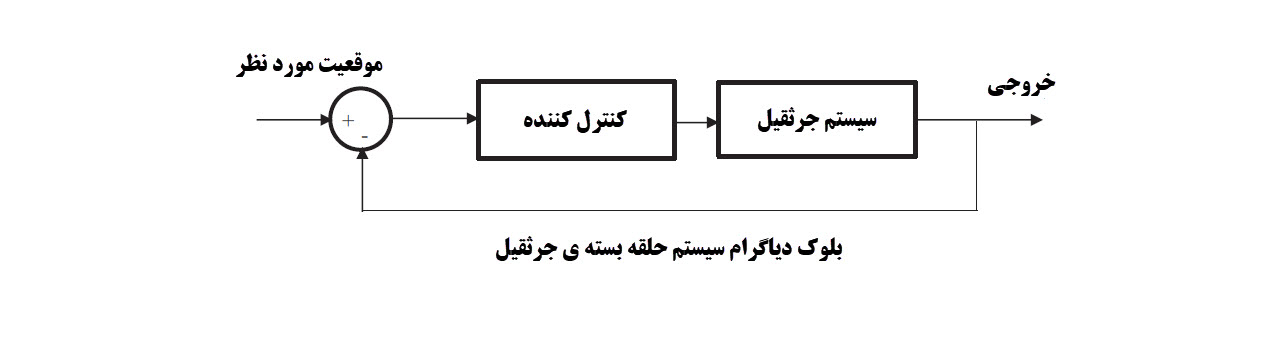
سیستم کنترلی دیگری که بهطور معمول برای سیستم کنترل جرثقیل طراحی شده است، طرح کنترل حلقه بسته فیدبک دار بوده است. این طرح کنترلی، توانایی تنظیم عملکرد سیستم جرثقیل را بر اساس پاسخ خروجی مورد نظر فراهم کرد. طرحهای بازخوردی از اندازهگیری و برآورد وضعیتهای سیستم استفاده میکنند تا نوسانات را کاهش دهند و به دقت موقعیتیابی برای سیستم دست یابند. بنابراین، حلقه فیدبک یا طرحهای کنترلی حلقه بسته به نظر میرسد که نسبت به اختلالات و تغییرات پارامترها کمتر حساس هستند. شکل پایین یک نمودار بلوکی را برای پیادهسازی استراتژیهای کنترل حلقه بسته برای سیستمهای جرثقیل نشان میدهد. با این حال، سیستمهای کنترل فیدبکی به حسگرهایی برای تعیین موقعیت واگن و همچنین زاویه نوسان بار نیاز دارند. اضافه کردن حسگرهای لازم به سیستم جرثقیل همراه با مشکلات نصب آنها هزینه اضافی را در بر دارد. علاوه بر این، در سیستم کنترل فیدبکی ، مسائل پایداری و مشکلات نویز به وجود میآید که ممکن است برای اینگونه ماشینهای بزرگ، قدرتمند و گرانقیمت بسیار پرخطر باشد. یکی از معایب سیستمهای حلقه بسته این است که به دلیل تأخیر ورودی در حلقه بازخورد، کند هستند.
برای مثال، تعیین زاویه نوسان بار قبل از اجرای طرح کنترل ضروری است تا نوسانات کاهش یابد . با این حال، طراحی بهتر ممکن است منجر به عملکرد سریعتری شود. یکی از معایب واقعی کاربرد کنترلکنندههای بازخورد در جرثقیلهای صنعتی، نیاز به اندازهگیری دقیق نوسان و سرعت بار است. علاوه بر این، نصب حسگری بر روی جرثقیل به منظور استراتژی بازخورد، در کنار اپراتورهای انسانی، میتواند فرآیند را مختل کند، زیرا اپراتور انسانی معمولاً از حرکات ناشی از کنترل رایانهای ناراحت میشود . همچنین میتوان دو کنترلکننده فیدبک دار را ترکیب کرد تا به طور همزمان به نوسان و کنترل پیگیری رسیدگی کند. با استفاده از این استراتژی کنترل، طراح قادر است مسیرهای مختلفی را بسته به محیط کاری مدیریت کند. در این مقاله، استراتژیهای کنترل حلقه بسته به کنترل خطی، کنترل بهینه، کنترل تطبیقی، کنترل هوشمند، کنترل حالت لغزشی و سایر طرحهای کنترلی تقسیمبندی شدهاند همانطور که در شکل زیر نشان داده شده است.
1.2.4 کنترل خطی
کنترل تناسبی-انتگرالی-مشتقگیری. یکی از تکنیکهای کنترل خطی که به طور گستردهای در سیستمهای جرثقیل به کار میرود، کنترل تناسبی-انتگرالی-مشتقگیری (PID) است. برای سازگاری با طولهای مختلف کابل، میتوان ضرایب کنترلکننده PID را بر اساس طول کابل تنظیم کرد. در ادبیات مربوطه، روشهای مختلفی مورد بررسی قرار گرفتهاند که شامل تکنیک مکان ریشه (root locus) و تکنیکهای متعددی از هوش محاسباتی مانند بهینهسازی تجمع ذرات (PSO) میشود. در واقع، کنترلکنندههای نوع تناسبی-مشتقگیری (PD) نیز برای کنترل زوایای نوسان استفاده شدهاند، به دلیل توانایی آنها در رسیدگی به مشکلات نوسانی.
در مقاله ، مشخص شده است که بیشتر کنترلکنندههای PID با کمک تکنیکهای دیگر توسعه یافتهاند یا با استفاده از دو کنترلکننده نوع PID برای کنترل موقعیت و نوسان بار عمل کردهاند. کنترل موقعیت یک سیستم جرثقیل دروازهای با حذف نوسان بهطور موفقیتی در مقاله ای با استفاده از روش نیورال نتورک خودتنظیم (NNST) به عنوان برآوردگر برای تنظیم ضرایب کنترلکننده PD پیشنهاد شده است.
در مقاله ای دیگر، یک کنترلکننده PID عصبی جدید پیشنهاد شد. این اقدام به دلیل دشواریهایی بود که در تنظیم ضرایب PID برای دستیابی به پاسخ مناسب سیستم در کنترل موقعیت دروازه و زوایای نوسان جرثقیل دروازه ای وجود داشت.
استراتژی کنترل پیشنهادی نیاز به گینهای بزرگ مشتق و انتگرال نداشت و در مقایسه با سایر سیستم های PID های کلاسیک و PIDهای عصبی تضمینکننده پایداری متقارن سیستم های کلاسیک بود .
را نسبت به سایر کنترل کننده های عصبی فراهم می آورد . برای سیستم های جرثقیل PID کلاسیک و PID دروازه ای ، چندین کار دیگر که شامل کنترل کننده مبتنی بر شبکه های عصبی ، منطق فازی ، الگوریتم بهینه سازی ذرات و الگوریتم بهینه سازی چند هدفه است انجام گرفته شد .
کنترلکنندههای PID نیز برای یک سیستم جرثقیل چرخشی طراحی شدهاند. کاهش قابل توجهی در نوسانات سیستم، همراه با حذف اثرات اختلال، با استفاده از منطق فازی نوع PD نسبت به کنترلکننده LQR حاصل شده است. نویسندگان همچنین عملکرد منطق فازی نوع PD را با یک کنترلکننده PD برای کنترل زاویه نوسان فعال مقایسه کردند. نتایج شبیهسازی نشان داد که با استفاده از کنترلکننده PD، زاویههای نوسان به طور قابل توجهی کاهش یافتهاند، در حالی که در زمینه سرعت پاسخ، منطق فازی نوع PD عملکرد بهتری داشت. در انتشار دیگری، نویسندگان یک کنترلکننده ترکیبی PD هممحور با یک کنترلکننده PID غیرهممحور (PDPID) طراحی کردند و آن را با PD هممحور برای کنترل زاویههای نوسان و قابلیت پیگیری ورودی در حالت تشدید نوسان پاندول مقایسه کردند. نشان داده شد که PDPID نتایج بهتری با کاهش نوسان داشت، اما در پاسخدهی به پیگیری کندتر بود و نسبت به کنترلکننده PD هممحور، overshoot بالاتری داشت.
کاوادا و همکاران نتیجهگیری کردند که کنترلکننده PD برای کنترل بارهای بلند شده در یک جرثقیل متحرک مفید است. با این حال، در مورد سیستمهای متغیر زمانی و یا غیرخطی، یافتن یک مجموعه از پارامترهای کنترلی مناسب دشوار بود. بنابراین، الگوریتم ژنتیک برای بهدست آوردن پارامترهای بهینه برای ضرایب کنترلکننده پیادهسازی شد.
1.1.2.4 رگولاتور خطی و مربعی
یک تنظیمکننده ( رگولاتور ) خطی-مربعی (LQR) برای کنترل سیستمهای جرثقیل استفاده شده است. یانگ و شیونگ در مقاله ای از روش LQR برای کنترل ضد نوسان جرثقیلهای سقفی بهرهبرداری کردند.
یک تکنیک فرمول پارامتریک برای حل مشکلات معکوس LQ در یافتن یک ماتریس وزندهی مناسب، Q، مورد استفاده قرار گرفت. روش LQR همچنین برای کنترل ضد نوسان یک جرثقیل بندری متحرک به کار رفته است. این جرثقیل دارای یک ویژگی اضافی به نام میکرو تریلی بود که دو درجه آزادی اضافی را برای کاهش نوسان کانتینر به علت حرکات ناشی از امواج اضافه کرد. هدف اصلی کنترل پیشنهادی کاهش خطای موقعیت تریلی بود که بر اساس یک تابع هزینه با سه عامل وزنی، شامل ورودی کنترل، خطای موقعیت تریلی و حرکت نسبی بین موقعیتهای تریلی و کانتینر تعیین شده بود. همانطور که آدلی و همکاران در سال ۲۰۲۰ پیشنهاد کردند، یک کنترل کننده LQR فازی توزیعشدهی موازی که با یک الگوریتم ژنتیک ترکیب شده بود، برای کنترل ضد نوسان یک جرثقیل سقفی از نوع دوپاندول طراحی شد.
یک کنترلکننده فازی به منظور به حداقل رساندن حدود بالای تابع عملکرد cuadratic استفاده شد، که در این راستا از یک الگوریتم ژنتیک برای انتخاب تنها قوانین مهم از میان تمامی قوانین تولید شده استفاده گردید. نتایج شبیهسازی پاسخ رضایتبخش و سریعتری را نشان داد.
یکی دیگر از کنترلکنندههای خطی که مورد استفاده قرار گرفته است، کنترلکننده فیدبک حالت است که در مقاله ای برای یک سیستم جرثقیل بوم پیادهسازی شده است تا زوایای نوسان بار را در حرکات عمودی و افقی بوم کنترل کند، همچنین در زوایای عمودی و افقی بوم. در مقاله دیگری ، از کنترلکننده فیدبک حالت استفاده شده است تا نسبت به تغییرات طول طناب مقاومتی حاصل شود و یک رویکرد نابرابری ماتریس خطی (LMI) تدوین گردید. با این حال، طراحی یک سیستم کنترل خطی نیاز به یک سیستم جرثقیل خطیشده دارد که ممکن است از نظر دقت نمایندگی مدل، کافی نباشد. عوامل غیردیفرانسیل، مانند باد، تغییرات طول کابل، جرم بار و اصطکاک ترولی سیستم جرثقیل در نظر گرفته نشدهاند. تمامی این عوامل میتوانند بر قابلیت اطمینان و عملکرد مدل خطیشده تأثیر بگذارند و آن را کاهش دهند.
2.4 کنترل بهینه
روشهای بهینه برای کنترلکننده MPC به تابع معیاری که توسط طراح انتخاب شده است، بستگی دارد. بیشتر تحقیقات در طراحی کنترلکنندههای MPC عمدتاً بر کنترل موقعیت و کاهش زاویه نوسان متمرکز بوده است. به عنوان مثال، جولوسکی و بگو در مقاله ای دو تابع معیار را در نظر گرفتهاند که وظایف مربوط به قرار دادن بار در یک موقعیت هدف در کمترین زمان انتقال و جلوگیری از نوسان بار ناشی از شتاب بار به همراه اختلالات خارجی را نشان میدهد. برای دستیابی به یک راهحل برای توابع معیار یا توابع هدف MPC، بهینهسازی چندمعیاره مورد استفاده قرار گرفت که در آن سهم توابع فردی با توجه به وزن آنها تعریف شده است تا یک سیگنال کنترلی بهینه به دست آید.
از نظر استحکام کنترل پیشبین (MPC)، مفهوم جابهجایی افق بر اساس مرحله نمونهبرداری بعدی بهکار گرفته شد که در آن سیگنال کنترلی بهینه آینده براساس افقهای پیشبینی تعریف شد. طبق پیشنهادی که در مقاله ای ارائه شده، بهجای انتظار برای اینکه بار بهسرعت به موقعیت نهایی خود برسد و زوایای تکانهای جرثقیل برقی کاهش یابد، میتوان کارایی انرژی را نیز در تابع هدف گنجاند تا جرثقیل انرژی کمتری مصرف کند. یک استراتژی بازخورد با تابع هدف جدید که بر پایه کارایی انرژی و ایمنی بود، برای یافتن راهحل بهینه شکلگرفت. یک کاربرد صنعتی از MPC در مقاله دیگری با استفاده از جرثقیل موبایل بندر لیبهر (جرثقیل بوم) نشان داده شد و نشان داده شد که کنترلکننده قابلیت قابل توجهی برای کنترل ضد تکان و ردیابی با حرکات هماهنگ لوفینگ و چرخش دارد. این کار با یک حلقه بازخورد اضافی برای افزایش استحکام سیستم کنترل بیشتر تقویت شد.
2.2.2.4 کنترل خطی، کمی و گاوسی و کنترل پیشبینی عمومی
کنترل بهینه خطی-مربع-گاوسی (LQG) به منظور کاهش نوسانات بار در یک جرثقیل سقفی پیشنهاد شده است. در این استراتژی کنترل پیشنهادی، یک مشتق مربعی از یک متغیر حالت به شاخصهای عملکرد استاندارد رایج در LQG برای کنترل و تخمین اضافه شده است. این اصطلاح اضافی یک تابع وزنی اضافی را برای طراحی به منظور به حداقل رساندن شاخصهای عملکرد ارائه کرد. نتایج نشان داد که وزن اضافی تخصیصیافته میتواند به منظور کاهش زاویههای نوسانات استفاده شود. دو نوع کنترلکننده، LQG و کنترل پیشبینیشده عمومی (GPC)، با موفقیت در مقالاتی برای کنترل نوسانات بار در یک جرثقیل دریایی اعمال و مقایسه شدند.
در مقاله ای ، استراتژی کنترل مبتنی بر GPC نیز توسعه یافته و در یک سیستم بالابر به کار گرفته شد، بهطوری که محدودیت نوسان جرثقیل در نظر گرفته شد تا نوسان بار در محدوده مجاز حفظ شود. کنترلکننده پیشنهادی بهبود مقاومت در برابر تغییر شرایط عملیاتی با توجه به طول طناب و بارجرمی را هدف قرار داده و همچنین برای کاهش ارتعاش باقیمانده و محدود کردن نوسانات گذرا طراحی شده است. برآورد آنلاین با استفاده از روش حداقل مربعات بازگشتی برای برآورد پارامترهای مدل دینامیکی به کار رفت. از آنجایی که اندازهگیری انحراف بار دشوار و هزینهبر است، یک رویکرد بدون سنسور با استفاده از الگوریتم GPC و یک اینترپولاتور فازی پیشنهاد شد. تکنیکهای توسعهیافته بر روی یک جرثقیل بالابر مقیاس آزمایشگاهی پیادهسازی شد. علاوه بر این، الگوریتمهای GPC و PSO در مقاله دیگری برای حل یک مسئله بهینهسازی با قید در هر مرحله زمانی پیشنهاد شدهاند که تابع هزینه را بر اساس محدودیتهای پایین و بالای سیگنال کنترلی و انحراف بار حداقل میکند.
3.2.4 کنترل تطبیقی
یک قابلیت سازگاری در برابر عدم قطعیتهای پارامترها و اختلالات خارجی سیستم به طور گستردهای با استفاده از روش کنترل تطبیقی که توسط محققان متعددی در مقالات مختلفی برای سیستمهای جرثقیل سقفی و در مقاله ای دیگر برای سیستم جرثقیل برج پیشنهاد شده است، مورد بررسی قرار گرفته است. کنترل تطبیقی این قابلیت را دارد که این عدمقطعیتها را در چارچوب طراحی کنترل مبتنی بر لیاپانوف برآورد کند. بنابراین، این مزیت میتواند انگیزهای برای طراحی آن طرحهای کنترلی باشد که بر اساس مدلهای غیرخطی که سیستمهای غیرخطی را به دقت نشان میدهند، ساخته شدهاند . در مقاله ای ، کنترلی تطبیقی برای یک جرثقیل سقفی دارای عدمکارایی در حضور عدمقطعیتهای پارامتری طراحی شده است. سازگاری در برابر وجود عدمقطعیتها با استفاده از روش کنترل تطبیقی نشان داده است که این روش قادر به دستیابی به موقعیت دقیق سبد و حذف نوسانات باقیمانده بوده است. این روش به دلیل نظام بازخورد آنیاش، یک استراتژی کنترلی مؤثر ارائه داده است که باعث افزایش Robustness سیستم کنترل میشود.
دستیابی به یک موقعیت دقیق برای ترولی و کاهش زوایای نوسان از اهداف اصلی در سیستم کنترل جرثقیل است، اما تأثیر حرکت بلند کردن بار نیز بسیار حائز اهمیت است و باید در استراتژیهای کنترلی گنجانده شود. در نظر گرفتن حرکات بلند کردن یا تغییرات طول کابل در موقعیت ترولی منجر به افزایش بهرهوری کاری میشود. بنابراین، این یکی از الزامات مهم در سیستم کنترل جرثقیل است. در مقاله ای ، یک کنترل غیرخطی تطبیقی برای جرثقیلهای سقفی در نظر گرفته شده که تأثیرات بلند کردن بار را در نظر میگیرد. در این مقالات، یک کنترل تطبیقی که شامل تعدیل پارامترهای ناشناخته سیستم مانند نیروهای اصطکاک و وزن بار ناشناخته بود، طراحی شده است. همچنین، یک کنترلکننده تطبیقی برای جرثقیل سقفی دو پاندولی در مقاله دیگری پیشنهاد شد. پایداری اسیمپتوتیک سیستم با تکنیکهای لیاپانف تضمین شده و نتایج شبیهسازی نشاندهنده این است که کنترلکننده تطبیقی پیشنهادی در برابر عدمقطعیتهای پارامتری سیستم و اختلالات خارجی مقاوم است.
علاوه بر این، کنترل مرجع مدل (MRC) نیز به دلیل استحکام آن برای سیستم عدم قطعیت ها و غیرخطی ها در پژوهش مورد بررسی قرار گرفته است.بسیاری از کاربردهای MRC بر روی کنترل پیگیری وضعیت متمرکز بودهاند اما تعداد کمتری به مسائل مربوط به موضوع مورد بحث ما پرداختهاند. اخیراً، هر دو معیار در مقاله ای مورد بررسی قرار گرفتند، که در آن یک فرمدهی ورودی با MRC ترکیب شده است (IS-MRC) تا مقاومت در سرکوب نوسانات قلاب و بار برای یک جرثقیل دوپاندولی تقویت شود. فرمدهی ورودی با کاهش رفتار پیچیده حالتهای مدل مرجع و سیستم ، مقاومت MRC را تقویت کرده است. کنترلکننده بر روی یک جرثقیل پل پیادهسازی شده و کاهش مؤثر نوسانات قلاب و بار را نشان داد. IS-MRC همچنین بر روی یک سیستم جرثقیل برجی مقیاس آزمایشگاهی پیادهسازی شده است . مقاومت IS-MRC بیشتر بهبود یافته است در حالی که پیگیری و تلاش کنترلی رضایتبخش همچنان حفظ شده است.
علاوه بر این، آثار متعددی که طرح کنترل تطبیقی را با سایر طرحهای کنترلی ترکیب کردهاند، گزارش شده است. این ترکیبها بهمنظور افزایش استحکام یک استراتژی کنترلی و همچنین الزامات تولید یک کنترلر با کیفیت بالا، برای کنترل جرثقیلهای با کمبود عملگر و کاهش نوسانات بار پیشنهاد شدهاند. به عنوان مثال، یک کنترلر ترکیبی از کنترل تطبیقی مدل مرجع (MRAC) و کنترلر حالت لغزشی (SMC) برای یک جرثقیل سقفی در مقاله ای طراحی شده است تا استحکام را بهدست آورد و پاسخهای یکنواخت سیستم را در برابر تغییرات پارامترهای سیستم تضمین کند. کنترلر پیشنهاد شده نیازی به اطلاعات پیشین از پارامترهای نامعین، مانند بار و اصطکاک نداشت، زیرا کنترلر بهطور خودکار بهمنظور برآورد این مقادیر تطبیق پیدا میکند. برخی دیگر از ترکیبها شامل کنترلر حالت لغزشی فازی تطبیقی ، کنترل تطبیقی پسگام، کنترلر PID فازی تطبیقی ، کنترل تطبیقی مبتنی بر برنامهریزی حرکت ، و کنترل تطبیقی فازی پروپوزیونال انتگرال با ردیابی حالت لغزشی است.
4.2.4 کنترل هوشمند
تعداد زیادی کنترلکننده هوشمند برای سیستمهای جرثقیل به کار گرفته شدهاند. این کنترلکنندهها عمدتاً بر اساس شبکههای عصبی (NN) و کنترلکنندههای منطق فازی طراحی شدهاند.
4.2.4.1 شبکه های عصبی
یکی از کنترلکنندههای هوش مصنوعی قابل توجه که در سیستمهای کنترل جرثقیل به کار رفته است، شبکه عصبی (NN) میباشد. استفاده از NN به عنوان یک رویکرد هوشمند به منظور مقابله با مشکلات مدلهای ریاضی اهمیت زیادی دارد. NN دارای توانایی پردازش غیرخطی خوبی است و به دلیل معماری بهطور ذاتی موازی، از robustness بالایی برخوردار است. علاوه بر این، NN با استفاده از یک طرح بازخورد، در برابر تغییرات طول کابل و عدم قطعیت مقاوم است. پژوهشگران متعددی از NN برای سیستمهای جرثقیل سقفی استفاده کردهاند. کار لی پیشنهاد میدهد که ترکیبی از NN و کنترلکننده مد لغزشی (SMC) به کار گرفته شود تا موقعیت دقیق قلاب و حذف نوسانات بار را به دست آورد. SMC به عنوان یک الگوریتم خودتنظیم برای تنظیم پارامترهای پیشنهادی NN به کار رفته است. سایر کاربردهای NN شامل NN خودتنظیم، شبکه تابع پایه شعاعی (RFBN) با الگوریتم یادگیری بهینهسازی ازدحام ذرات (PSO) برای موقعیتیابی قلاب و حذف نوسانات و همچنین شبکه عصبی بازگشتی (RNN) با روش نزول گرادیان برای تنظیم آنلاین پارامترهای RNN است.
در مورد جرثقیلهای چرخشی، طرحهای کنترل فیدبک مختلفی برای کاهش نوسان بار اجرا شده است. با این حال، این روشهای کنترلی تنها قادر به کاهش نوسان بار در جهت دایرهای هستند و نه در جهت شعاعی. یکی از رویکردهایی که برای حل این مشکل استفاده شده، به کارگیری یک قانون فیدبک خطی و سوئیچ بین دو حالت در جهات شعاعی و دایرهای بوده است. به عنوان نتیجه، این روش نیاز به دانش نظریههای کنترلی پیچیده دارد و همچنین قادر به کنترل زاویههای نوسان برای چرخش جرثقیل بیش از 90 درجه نبوده است. برای رفع این مشکل، ناکازونو و همکاران در مقاله ای یک کنترلکننده شبکه عصبی با آموزش محاسبات تکاملی پیشنهاد کردند که قادر به کنترل نوسان بار در هر دو جهت دایرهای و شعاعی به صورت همزمان بود. به علاوه، الگوریتم پیشنهادی موثرتر و سادهتر از یک کنترلکننده متداول بود. یک الگوریتم تکاملی ترکیبی در یک مقاله برای کنترل یک سیستم جرثقیل سهبعدی کمعملکرد با استفاده از RNN پیشنهاد شد. رویکرد ترکیبی الگوریتم تکاملی به گونهای طراحی شده بود که اپراتورهای ژنتیکی GA (ترکیب و جهش) را در PSO گنجانده و از این طریق نسلی را با توجه به انتخاب والدین که بر اساس نتایج تناسب بود، ایجاد کند. الگوریتمهای ترکیبی برای ساخت یک کنترلکننده مبتنی بر RNN مورد استفاده قرار گرفتند و عملکرد خوبی از خود نشان دادند، به طوری که توانستند سیستم را به نقطه مطلوب هدایت کنند. یک شبکه عصبی بازگشتی نیز برای سیستم جرثقیل چرخشی در یک مقاله دیگر طراحی شد که نشان داد شبکه عصبی بازگشتی در مقایسه با شبکه عصبی پیشرو برتر است. به علاوه، شبکه عصبی مصنوعی توسط دراگ برای کنترل موقعیت بار یک جرثقیل دریایی پیشنهاد شد و نتایج خوبی به دست آمد.
4.2.4.1 کنترل کننده منطق فازی
یک کنترلکننده منطق فازی (FLC) بهطور گستردهای در بسیاری از سیستمهای کنترل جرثقیل استفاده شده است. FLC دارای سازگاری بالایی است و نیازی به بهدست آوردن مدل دقیقی از شی کنترلشده ندارد بهدلیل روش هوشمند آن. با پیچیدهتر شدن سیستمها، مانند سیستمهای جرثقیل با غیرخطیها، بهدست آوردن مدل ریاضی دشوار شد. بنابراین، FLC دارای مزیتی است زیرا نقش مدل ریاضی را با یک مدل فازی جایگزین میکند که بر اساس قانونی که به فرمت اگر-آنگاه ساخته شدهاند، عمل میکند. علاوه بر این، FLC در برخورد با ماشینهای ناپایدار و پیچیده، سیستمهای غیرخطی و مسائل کنترل نقطه بهینه عملکرد خوبی دارد.
یک کنترلر منطقی فازی (FLC) بهطور گستردهای برای کنترل موقعیت ترولی و زوایای نوسان بار در جرثقیلهای دروازهای و بالابر استفاده شده است . یک کنترل ضد نوسان مبتنی بر منطق فازی و مقاوم که میتواند با یا بدون حسگر زاویه نوسان کاربرد داشته باشد، پیشنهاد و در یک آزمایشگاه جرثقیل بالابری تأیید شد. در مقاله ای ، یک شبکه عصبی (NN) به همراه یک FLC بهعنوان کنترلر عصبی-فازی برای یک سیستم جرثقیل سهبعدی استفاده شده است. رویکرد اصلی استراتژی کنترل پیشنهادی، استفاده از نظریه حالت لغزشی بهعنوان یک الگوریتم یادگیری بهمنظور تنظیم پارامترهای عصبی-فازی بود. در کار دیگری، لی و همکاران ترکیب یک شبکه عصبی و یک منطق فازی را در یک سیستم خاص جرثقیل پیشنهاد دادهاند. الگوریتم یادگیری که برای کنترلر عصبی فازی اتخاذ شده است، بر اساس بهینهسازی کلونی مورچهها بوده و عملکرد همگرایی سریعی را در مقایسه با الگوریتم پسانتشار نشان داده است. علاوه بر این، یک FLC همچنین میتواند برای تنظیم گینهای PID استفاده شود که بهایناستراتژی کنترلر خودتنظیم فازی PID اطلاق میشود . سیگنالهای خروجی از یک FLC برای تنظیم دقیق پارامترهای PID به کار رفته است. این استراتژی ممکن است منجر به کنترل دقیقی با واکنش عملکردی بهتر نسبت به کنترلرهای PID معمولی شود. علاوه بر این، یک FLC مبتنی بر شکلدهی ورودی برای جرثقیل بالابری از نوع دوپاندولی پیشنهاد شده است. شکلدهی ورودی بهعنوان یک کنترلر پیشخور طراحی شده است تا فرمان کنترلی که توسط کنترل فازی تولید میشود بهینهسازی کند. مقاله روش مذکور را برای جلوگیری از انفجار قاعده نمایی یک FLC با اعمال ماژولهای قاعده ورودی منفرد مورد بررسی قرار داده است. روش پیشنهادی از نظر عملی بودن، اعتبار و استحکام بهعنوان یک کنترل ضد نوسان برای جرثقیل بالابری نشان داده است.
پیادهسازی یک کنترلکننده فازی (FLC) در سیستمهای جرثقیل دورانی/برج پیشنهادی در مقاله ای مطرح شد تا موقعیت و تغییر مکانهای نوک لینک انعطافپذیر که شبیه ساختار یک سیستم جرثقیل برج بود را کنترل کند. زوایای نوسان پاندولی که به لینک متصل بودند نیز کنترل شدند. یک کنترلکننده فازی تطبیقی مبتنی بر شبکههای عصبی مصنوعی با رویکرد سلسله مراتبی به کار گرفته شده که دارای دو کنترلکننده زیرسیستم برای کنترل موقعیت و جذب ارتعاشات بود. برخی دیگر از کاربردهای FLC برای جرثقیلهای برج شامل کنترل ضد نوسان با عدمقطعیتهای تاخیری با استفاده از کنترل فازی قوی تطبیقی ، کنترلکننده ضد نوسان با استفاده از تکنیک خوشهبندی فازی و FLC با پذیرش دو زیرسیستم مستقل است. کنترلکنندههایی که مسئول کنترل حرکات شعاعی و چرخشی یک جرثقیل بودند و کنترل ضد نوسان با استفاده از یک کنترلگر فازی (FLC) که قواعد آن از طریق نقشهبرداری عملکرد یک کنترلگر فیدبک با تأخیر زمانی بهدست آمده است.
4.2.5 کنترل مد لغزشی
به دلیل استحکام شناخته شدهاش، کنترل حالت لغزشی (SMC) توجه پژوهشگران را در بسیاری از زمینههای مختلف، از جمله کنترل جرثقیل، جلب کرده است. روش کنترل SMC به خوبی برای سیستمهای جرثقیل مناسب است زیرا در شرایط عدم قطعیت مؤثر است. با وجود این مزیت قابل توجه، این روش به عنوان یک کنترلگر پایدار و بسیار دقیق نیز شناخته میشود. نشریات زیادی در مورد SMC برای کنترل سیستمهای جرثقیل هوایی منتشر شده است. انواع متفاوتی از طراحیهای SMC وجود دارد، از جمله یک SMC نهایی، یک SMC درجه دوم برای جرثقیل کانتینری، یک SMC درجه دوم برای جرثقیل هوایی سهبعدی با پارامترهای نامشخص، یک SMC سلسلهمراتبی، یک SMC یکپارچه و یک SMC یکپارچه در زمان گسسته.
نشان داده شده است که کنترل کننده مد لغزشی (SMC) طرح کنترلی امیدبخشی برای رد عدم قطعیتها و غیریتهای سیستم ارائه میدهد. در مقاله ای ، یک جرثقیل فراساحلی با استفاده از SMC مرتبه دوم کنترل شد. مزیت طراحی یک SMC مرتبه بالاتر در مقایسه با SMC مرتبه اول این است که قادر به حذف محدودیتهای درجه نسبی میباشد. همچنین این نوع طراحی میتواند با طراحی مناسب، لرزشهای بیمورد را از بین ببرد. این به دلیل سوئیچینگ کنترل با فرکانس بالا است . در تحقیقی نیز از یک SMC برای کنترل جرثقیل فراساحلی استفاده شده است. علاوه بر این، وازکز و همکاران یک SMC مرتبه دوم را برای کنترل موقعیت سیلندر نامتقارن سیستم هیدرولیک یک جرثقیل هیدرولیکی متحرک پیادهسازی کردند.
علاوه بر این، SMC با سایر طرحهای کنترلی ترکیب شده تا دقت و استحکام بالاتری را حاصل کند. طراحیهای ترکیبی برای سیستمهای جرثقیل شامل SMC تطبیقی ، SMC فازی ، ترکیب فرم ورودی و SMC و مدل SMC فازی مبتنی بر شبکههای عصبی بوده است. بیشتر این رویکردها به کاهش وجود عدم قطعیتها در سیستمهای جرثقیل از جمله جرم واگن، جرم بار، انعطافپذیری کابل و اختلالات ناشی از باد متمرکز شدهاند.
4.2.6. سایر طرحهای کنترلی
این بخش به بررسی چندین کنترلکننده دیگر شامل تنظیم گین، کنترل H-infinity و طرح m-synthesis میپردازد که برای کنترل جرثقیلها به کار گرفته شدهاند. عمر و نیفه یک کنترل بازخورد تطبیقی با تنظیم گین برای کنترل حرکات انتقالی و چرخشی یک جرثقیل برج پیشنهاد کردند که تأثیرات طول کابلها و بارهای مختلف را در نظر میگیرد. بنابراین، برای سازگاری با تغییرات این پارامترها و دستیابی به عملکرد خوب سیستم، گینهای کنترلکننده بازخورد بر اساس معیاری تنظیم شدند که زمان نشستن سیستم باید برابر با دوره نوسان بار باشد. این کار مقالات جدیدتر بیشتر بهبود یافت که شامل اصطکاک در طراحی کنترلکننده برای بهبود عملکرد سیستم بود. یک تکنیک جبران اصطکاک برای برآورد اصطکاک استفاده شد و سپس اقدام کنترلی معکوس برای حذف آن به کار گرفته شد. مطالعه تجربی نشان داد که نوسان بار به طرز قابل توجهی نسبت به سیستم بدون جبران اصطکاک کاهش یافته است. از آنجایی که فرایند تعیین گینهای مناسب همیشه زمانبر و نیاز به طراح ماهر دارد، طراحی تنظیم گین از طریق تکنیک خوشهبندی فازی توسط ساداتی پیشنهاد شد. در این رویکرد، زمانبند بر اساس نتایج خوشهبندی طراحی شد. نشان داده شد که کاربرد منطق فازی در تنظیم گین ممکن، کمهزینه و آسان برای پیادهسازی است.
علاوه بر این، کنترل مقاوم H-infinity نیز برای کنترل جرثقیلها به کار برده شده است. این موارد شامل کنترل H-infinity برای جرثقیل گردان، کنترل چندهدفه H-infinity برای جرثقیل سقفی، کنترل H-infinity با استفاده از ناحیه LMI گرافیکی برای جرثقیل دروازهای و کنترل H-infinity برای کنترل نقطهای جرثقیل بوم دریایی میباشد. در تحقیقی، کنترل ساختار متغیر به همراه یک طرح کنترل m-synthesis برای کنترل نوسانات سیستم جرثقیل سقفی مورد بررسی قرار گرفته است. سایر کارها شامل کنترل مقاوم بر مبنای موج برای کنترل ارتعاشات سیستم جرثقیل دروازهای، کنترل مقاوم یک سیستم جرثقیل دروازهای با باربرداری و کنترل مقاوم با ویژگیهای ویسکوالاستیک و باربرداری برای کانتینرهای جرثقیل نصب شده بر روی کشتی میباشد. بهتازگی، یک روش کنترل پیگیری خطا برای جرثقیل سقفی که نیاز به زاویه کابلی صفر آبنوس را نداشت، پیشنهاد شده است . نتایج شبیهسازی و تجربی نشان داد که این کنترلکننده در برابر طولهای کابل متفاوت، موقعیتهای دلخواه، زاویههای اولیه نوسانات بار و اختلالات خارجی مقاوم بوده است.
طبق مطالعهای که در پژوهشی انجام شده، جرثقیلهای کانتینری فراساحلی و جرثقیلهای کشتی به انواع مختلفی از اختلالات، از جمله حرکات ناشی از امواج و باد، که شامل حرکات بالا و پایین، رول و پیچش در بندرهای متحرک میشود، معرض قرار گرفتند. در نتیجه، اثرات لرزشی یا جابجایی کشتی که توسط امواج اقیانوس ایجاد میشود، میتواند منجر به برخورد بار و عرشه شود. علاوه بر این، جرثقیلهای فراساحلی شامل تغییرات پارامتری، مانند تغییر بار در فرآیندهای تخلیه و بارگیری هستند. بنابراین، چندین کنترلکننده دیگر نیز برای کنترل این نوع جرثقیلها پیشنهاد شده است. آکیاما و همکاران نشان دادند که با استفاده از یک مدل ریاضی مناسب، نیروی بازگردانی کشتی تأثیر زیادی بر نوسان بار دارد. با این حال، طراحی کنترل در یک جرثقیل کشتی واقعی با استفاده از روش آزمایش و خطا پیادهسازی شد. سوتاکورن و پارکر رویکرد مبتنی بر سینماتیک معکوس و استراتژی SMC را برای کاهش نوسان بار ناشی از وضعیت دریا در جرثقیلهای رباتیک کشتی بررسی کردند. این استراتژی کنترلی برای تسهیل انتقال سریع بار "کشتی به کشتی" در شرایط دریایی نامساعد استفاده شد. در مقاله دیگری، انتقال مستقیم (STT) پیشنهاد داده شد تا نوسان بار را با استفاده از تحلیل شبیهسازی کاهش دهد. در کار دیگری، یک مکانیزم کنترلی نوآورانه مبتنی بر اتلاف انرژی برای کنترل نوسان جرثقیلهای کشتی توسعه داده شد . اثربخشی روشهای پیشنهادی برای کاهش نوسان از طریق مطالعات شبیهسازی تأیید شد. جنگ و همکاران نیروی اوترایدر را برای یک جرثقیل متحرک با استفاده از بهینهسازی برنامهریزی خطی بررسی کردند تا ایمنی جرثقیل را تضمین کنند.
در کاری دیگر، کنترل بهینه مبتنی بر مدل برای موقعیت بار یک جرثقیل بندری خودران پیشنهاد شد و این کنترلكننده در یک ناحیه فرکانس بالا کارآمد بود.
4.3. کنترل مسائل دیگر
این بخش رویکردهای مختلفی را برای کنترل مسائل متعدد در سیستمهای جرثقیل بررسی میکند، که شامل کنترل بازخورد با اپراتورهای انسانی، تکنیکهای کنترلی برای جلوگیری از واژگونی جرثقیلها و روشهایی برای کنترل بارهای در حال نوسان در هنگام بالابردن است. در راستای دستیابی به عملکرد ایمن و عالی سیستم، این مسائل نیز باید مورد توجه قرار گیرند.
4.3.1. کنترل بازخورد با اپراتورهای انسانی
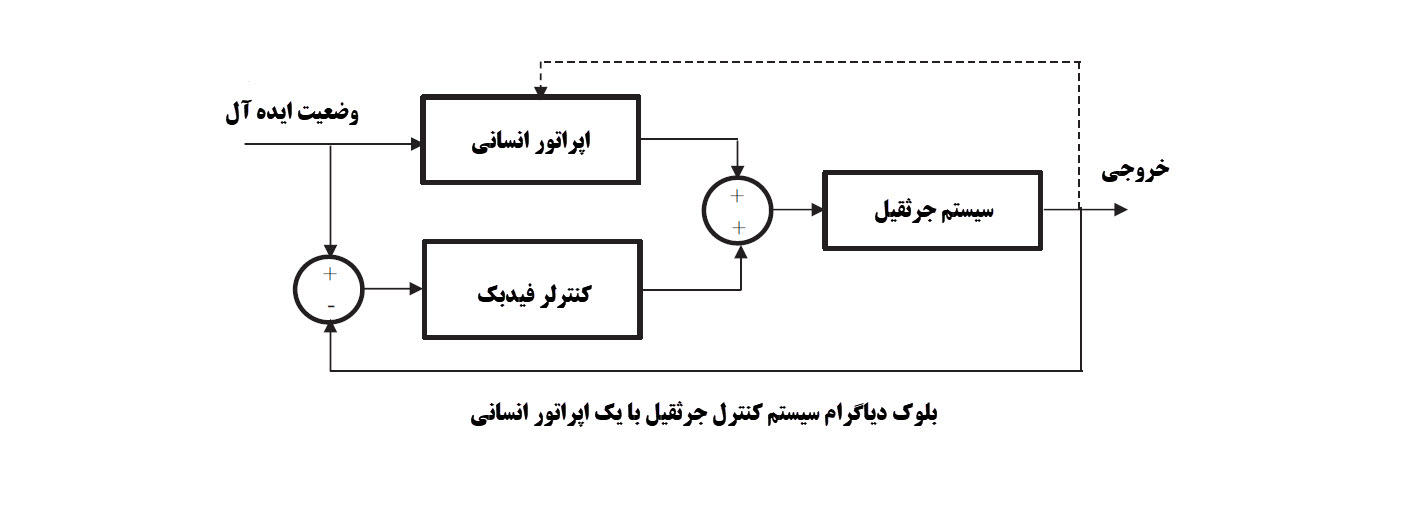
تقریباً تمام جرثقیلها توسط اپراتورهای انسانی کنترل میشوند و بنابراین سیستم کنترل جرثقیل باید با اپراتورها سازگار باشد. علاوه بر این، اپراتور انسانی یک کنترلکننده بازخوردی است و عملکرد آنها ممکن است از یک وظیفه به وظیفه دیگر و از یک اپراتور به اپراتور دیگر به طرز چشمگیری متفاوت باشد. شکل 10 نمودار بلوکی از یک سیستم کنترل جرثقیل با اپراتور انسانی را نشان میدهد. در این حالت، مشکلات کنترل جرثقیل با تجربه و شهود اپراتورهای خبره و ماهر حل میشود. با این حال، این کار چالشی است، زیرا اپراتور باید وظایف را با در نظر گرفتن هم کارایی و هم ایمنی انجام دهد. بنابراین، ممکن است طرحهای کنترل کمکی به جرثقیلهای اپراتورمحور اضافه شود تا به اپراتورها کمک کند و عملکرد سیستم را بهبود بخشد. چندین تحقیق در این زمینه توسط محققان مؤسسه تکنولوژی جورجیا، ایالات متحده انجام شده است. کار آنها عمدتاً شامل توسعه ورودیهای شکلدهنده برای کمک به اپراتورهای انسانی در کنترل جرثقیل بوده و تأییدات با استفاده از یک جرثقیل برجی 10 تنی انجام شده است.
تکنیکهای شکلدهی ورودی در تحقیقات مختلفی توسعه یافتهاند تا به اپراتورهای جرثقیلهای پل کمک کنند. آزمایشها نشان دادند که اپراتورها وظایف جابهجایی را سریعتر، امنتر و مؤثرتر با استفاده از شکلدهی ورودی انجام میدهند. بهعلاوه، یک شکلدهنده ورودی با سفر صفر طراحی شد تا overshoot (افزایش ناخواسته) را در جرثقیلهای انسانی کاهش دهد. در پژوهشی نشان داده شد که کنترلکننده شکلدهی ورودی بهتر از کنترل PD عمل میکند، با زمان تکمیل متوسط کمتر و مصرف انرژی کمتری. عملکرد شکلدهی ورودی برای کمک به اپراتورهایی که جرثقیلهای پل دوتایی را هدایت میکنند نیز در تحقیقی جداگانه بررسی شد. نتایج تجربی مزایای شکلدهی ورودی را نشان داد که به اپراتورها امکان میدهد جرثقیل را بسیار سریعتر و امنتر هدایت کنند. در یک کاربرد عملی، جرثقیلها همچنین برای تکان دادن توپهای تخریب که ساختمانها و سازههای ناخواسته را تخریب میکنند استفاده میشوند و هدف افزایش نوسان پاندول است. برای رسیدن به این هدف، روشی که به اپراتور در حداکثر کردن نوسان بار جرثقیل کمک کند، طراحی و از طریق شبیهسازیها و آزمایشهای متعدد تأیید شده است.
در صنایع، کنترلر معلق با دکمه فشاری به طور گستردهای برای راهاندازی سیستم جرثقیل استفاده میشود. در مقاله دیگری، چندین رابط کاربری برای کنترلر جرثقیل لمسی ارزیابی شده است. آزمایشهایی که با یک اپراتور انجام شد نشان داد که کنترلر لمسی میتواند به طور مؤثری برای کنترل جرثقیل نسبت به کنترلر استاندارد استفاده شود. از آنجا که بار به طور قابل توجهی در مقایسه با ورودیهای کنترلی که توسط اپراتور انسانی ارائه میشود، تأخیر دارد، روش کنترلی که به اپراتور کمک میکند با نمایش گرافیکی پیشبینی مکان توقف جرثقیل، در پروژه دیگری پیشنهاد شد. ترکیب عناصر رابط کاربری پیشبینیکننده و کنترل شکلدهی ورودی، بهبود عملکرد جرثقیل را از نظر زمان تکمیل کار و دقت موقعیتی نشان داد. در کار دیگری، رابط جدیدی توسعه داده شد که به اپراتورهای انسانی اجازه میداد با حرکت یک دستگاه دستی (چوب یا دستکش) جرثقیل را هدایت کنند. آزمایشها با دو مطالعه اپراتور بر روی جرثقیل صنعتی 10 تنی نشان داد که کنترل جرثقیل با حرکت دست سریعتر و ایمنتر از استفاده از کنترلر معلق با دکمه فشاری استاندارد بود.
در کاری دیگر، یک سیستم کنترل نیمهاتوماتیک برای بررسی و اصلاح مسیر مرجع ارائه شده توسط یک اپراتور انسانی بهمنظور جلوگیری از برخورد در جرثقیلهای سقفی پیشنهاد شده است. حتی اگر اپراتور در کنترل جویاستیک اشتباهاتی مرتکب شود، سیستم توسعهیافته میتواند بهطور خودکار از موانع جلوگیری کند. همچنین یک سیستم کنترل لمسی که میتواند بار را بهراحتی و بهطور ایمن بدون برخورد با موانع منتقل کند، برای جرثقیل چرخشی پیشنهاد شده است . در کار دیگری، سیستمی برای جرثقیل توسعه یافته است که بار اپراتور را از طریق تغییر میزان انرژی کاهش میدهد و عملیات شهودی بار سنگین را تسهیل میکند.
4.3.2. کنترل واژگونی جرثقیل
مسئله واژگونی جرثقیل از اصلیترین دلایل حوادث جرثقیلها به شمار میآید. تلاشهای متعددی برای جلوگیری از واژگونی جرثقیلها ارائه شده است. آبو-شاناب و سفری چندین مطالعه موردی درباره واکنش به واژگونی و عواملی که بر پایداری واژگونی تأثیر میگذارند را بررسی کردهاند. این عوامل شامل بار برداری/چرخش و شرایط خرابی زمین میباشد. در یک مطالعه، نویسندگان مدلی برای بررسی پایداری واژگونی یک ماشین بارگیر هیدرولیک سنگین توسعه دادند. نتایج شبیهسازی نشان داد که انعطافپذیری پایه و تماس با زمین پایداری ماشین را کاهش میدهد، در حالی که انعطافپذیری در اتصالات دستکاری به دلیل انطباق هیدرولیکی پایداری ماشین را افزایش میدهد. رایخ و همکارانش تحلیل پایداری را برای یافتن وزنه بار و پیکربندی جرثقیل که بر واژگونی تأثیر میگذارد، انجام دادند. یک تحلیل نیمهدینامیک ساده انجام شد و تقریبهای خوبی برای پایداری واژگونی ارائه گردید تا نوسان وزنه بار را مدیریت کند. این روش همچنین بر روی جرثقیل بوم متحرک با بارهای دو پاندولی آزمایش شد.
در تحقیق دیگری، موقعیت وزنه متحرک با استفاده از روش ضریب ایمنی پایداری مورد مطالعه قرار گرفت. با استفاده از این روش، موقعیتهای حداقل و حداکثر مناسب که ممکن است جرثقیل را در شرایط متعادل و ایمن نگه دارد، محاسبه گردید. ریشماوی به بررسی روشهای جایگزین برای پایداری واژگونی وزنههای متحرک و بارگیری دوتایی (دو جرثقیل یکسان که بار مشترکی را بلند میکنند) پرداخته است. روشی برای تعیین محدودههای موقعیت وزنه متحرک که از واژگونی جلو و عقب جلوگیری به عمل میآورد، پیشنهاد شده است. پایداری ایستا و شبهدینامیک برای محاسبه پیشبینیهای قابل اعتماد از وزنه متحرک و ارائه برخی راهنماها برای ایمنتر و کمتر آسیبپذیر کردن بارگیری دوتایی در برابر حوادث واژگونی استفاده گردید.
4.3.3 کنترل جهش محموله ها در حین بالا کشیدن
برای ارائه یک عملیات ایمن با جرثقیل، باید به مواردی که بار حین بلند کردن دچار نوسان میشود نیز توجه کرد. هنگامی که بار سنگین است و کابلهای تعلیق بلند هستند، انعطافپذیری کابل منجر به نوسان ارتعاشی در جهت بلند کردن میشود. اگرچه بسیاری از کنترلکنندهها برای کاهش نوسان پاندولی طراحی شدهاند، توجه کمتری به این نوع مشکل داده شده است. حرکات نوسانی بار میتواند خطرات ایمنی و دشواری در موقعیتیابی دقیق در حین عملیات تخلیه ایجاد کند. در ادبیات موجود، این موضوع در پژوهشی مورد بررسی قرار گرفته است. شکلدهی ورودی به دو صورت تکمد و دو مد طراحی شده تا حرکات نوسانی بار حین بلند کردن را کنترل کند. شبیهسازیهایی بر اساس یک جرثقیل سیلو که برای مدیریت ظروف زائد رادیولوژیکی در انبار رادیو لوژیکی کره توسعه یافته، انجام شد و آزمایشهایی بر روی یک جرثقیل قابل حمل در مؤسسه فناوری جورجیا صورت گرفت. نتایج شبیهسازی و آزمایش نشان داد که شکلدهی ورودی طراحی شده بسیار مؤثر در حذف حرکت نوسانی بار بود.
5. سیستمهای کنترل ضد نوسان برای جرثقیلهای صنعتی
کنترل جرثقیل به منظور افزایش بهرهوری و ایمنی اهمیت زیادی دارد، به همین دلیل شرکتهای متعددی سیستمهای کنترل ضد نوسان را توسعه دادهاند که میتوانند جرثقیلهای صنعتی را بهطور مؤثر کنترل کرده و نوسان بار را از بین ببرند. اکثر مشتریان بهدنبال کاهش زمان جابجایی با عملیات خودکار سیستم جرثقیل و کاهش بار کاری اپراتور هستند تا اپراتور بتواند بهطور کامل بر روی موقعیتیابی، برداشتن و قرار دادن بار تمرکز کند.
6. چالشهای کلیدی و جهتگیریهای پژوهشی آینده
این بخش به بررسی دشواریهای کلیدی و برخی از جهتگیریهای تحقیقاتی آینده میپردازد که ممکن است برای پژوهشگران در این زمینه مفید باشد. از آنجایی که ایمنی یکی از معیارهای مهم در عملیات جرثقیل است و واژگونی جرثقیل هنوز دلیل اصلی حوادث به شمار میرود، تحقیقات بیشتری در مورد کنترل جرثقیل به منظور جلوگیری از واژگونی آنها میتواند انجام شود. علاوه بر بهبود در ساختار مکانیکی جرثقیلها، اندازهگیری و کنترل دقیق میتواند به طور قابل توجهی به جلوگیری از واژگونی به جلو و عقب کمک کند. همچنین، الگوریتمهای کنترلی کارآمد برای جایگزینی دقیق و جلوگیری از نوسانات کم بار که قابلیت تعادل وزن متحرک جرثقیل را در نظر میگیرد، میتواند مورد بررسی قرار گیرد.
مشاهده شده است که تحقیقات اخیر هنوز به درستی به ملاحظات عدم قطعیتهای مدل و تغییرات پارامتر، همراه با تأثیرات مزاحمتهای خارجی مانند باد و موج دریا در استراتژیهای کنترلی توجه نکردهاند. این مشکلات در صنایع رایج هستند و تأثیرات قابل توجهی بر عملکرد جرثقیل دارند. بنابراین، این عوامل باید در طراحی کنترلکنندهها برای پیادهسازی در جرثقیلهای واقعی مد نظر قرار گیرند. به یک کنترلکننده مقاوم و نسبت به عدم قطعیتهای پارامتر و مزاحمتهای خارجی قدرتمند نیاز است و در این حالت، روش SMC به نظر میرسد کارآمدترین روش برای مقابله با این مشکلات باشد. عملکرد SMC میتواند با ادغام یک سازوکار انطباقی برای پیادهسازی تحقیقات آینده بهبود یابد.
تکنیکهای کنترل حلقه باز، از جمله شکلدهی ورودی و نرمسازی دستورات، بهطور مؤثر و عملی برای کاهش نوسانات بار در جرثقیلهای با دینامیک پاندول تک و دو پاندولی نشان داده شدهاند. با توجه به عدم قطعیتهای مدل، تغییرات پارامترها و اختلالات خارجی، نیاز است که شکلدهندهها و نرمسازهای ورودی از نوع تطبیقی و مقاوم طراحی شوند که بتوانند با تغییرات دینامیک جرثقیلها سازگار شده و آنها را مدیریت کنند. در این مورد، میتوان شناساییهای آنلاین سریع و دقیقی از فرکانسهای طبیعی و نسبتهای میرایی جرثقیلها انجام داد. بنابراین، شکلدهندهها و نرمسازها میتوانند بهروزرسانی شوند تا عملکرد یکنواختی تحت تمامی شرایط حاصل شود. علاوه بر این، برای جرثقیلهای دو پاندولی، شکلدهندهها و نرمسازهای ورودی چند حالته مقاوم میتوانند بیشتر مورد بررسی قرار گیرند.
در این مقاله همچنین نشان داده شده است که تعداد مقالات مرتبط با جرثقیلهای برجی و چرخشی بهطور قابل توجهی کمتر از مقالات مرتبط با جرثقیلهای دروازهای و بالابر بوده است. این ممکن است به دلیل دشواریهای کنترل چنین سیستمهای مکانیکی پیچیدهای باشد که بهطور همزمان حرکات انتقالی و چرخشی را شامل میشوند. علاوه بر این، نیاز به کنترل نوسان بار در ابعاد شعاعی وجود دارد. تصور میشود که فرصتهای تحقیقاتی زیادی در طراحی کنترلکنندههای مؤثر برای انواع جرثقیلهای برجی و چرخشی وجود دارد. از طرف دیگر، پیادهسازی کنترلکنندهها روی جرثقیلهای صنعتی واقعی بهجای استفاده از جرثقیلهای آزمایشگاهی مطلوبتر است، زیرا نتایج بهطور عملیتر خواهند بود. بهعنوان مثال، نیوپرت و همکاران کنترلکننده MPC توسعه یافته را روی یک جرثقیل بندری متحرک واقعی آزمایش کردند. علاوهبر این، حجم زیادی از کار بر روی کنترل جرثقیل بر اساس یک پاندول با بار نقطهای متمرکز شده است که در مقایسه با بار پاندول دوگانه، کمتر مورد توجه قرار گرفته است. در کاربردهای عملی، سیستمهای جرثقیل با دینامیک پاندول دوگانه باید بهطور ویژه مد نظر قرار گیرند، بهویژه زمانی که بار سنگینی در حال استفاده باشد. بار سنگین میتواند بهعنوان بار با جرم توزیعشده مدلسازی شود که از یک قلاب آویزان است. این مورد مکانیزمهای بالابری متفاوتی را در نظر گرفته و منجر به دینامیکهای سیستم متفاوتی شده است.
علاوه بر حمل بارهای مختلف با وزنهای گوناگون، سیستمهای جرثقیل همچنین برای انتقال بارهایی با اشکال مختلف استفاده میشوند که این امر منجر به دینامیک پیچیده سیستم شده است. این موضوع میتواند در آینده مورد مطالعه قرار گیرد. با وجود تمام چالشها، کنترل جرثقیلها با دینامیک دو پاندول، بهطور قابلتوجهی دشوارتر از مواردی است که تنها یک پاندول وجود دارد. برای طراحی یک کنترلکننده مؤثر، ممکن است به تقریبی از معادلات دینامیک غیرخطی اصلی نیاز باشد. علاوه بر این، یکی دیگر از مشکلات عملی در کنترل جرثقیل دو پاندولی، دشواری در بهدست آوردن زاویه دقیق بار و موقعیت آن است؛ چراکه نصب یک حسگر مناسب دشوار است. رابطه بین حرکات قلاب و بار قابل بررسی است و در آینده میتوان به بررسی کنترلکنندههایی که تنها بر مبنای حرکت قلاب یا روشهای بدون حسگر استوار هستند، پرداخت.
بسیاری از پژوهشها به بررسی تکنیکهای کنترل ترکیبی پرداختهاند که یک روش کنترل فردی را با سایر طرحهای کنترلی ترکیب کردهاند. این رویکردها به منظور دستیابی به موقعیت دقیق ترولی و کاهش نوسانات بار به طور همزمان پیشنهاد شدهاند. یکی از تکنیکهای مؤثر، استفاده از یک کنترلکننده بازخورد ترکیبی و یک کنترلکننده پیشبینی بر اساس تکنیک شکلدهی ورودی/فرمان است. در این زمینه تحقیقاتی، میتوان تحقیقات بیشتری در مورد استفاده از شکلدهنده ورودی و نرمکننده فرمان در حلقه بازخورد برای کنترل جرثقیل انجام داد. با این پیکربندی، ممکن است استحکام سیستم بهبود یابد، اما ثبات کلی حلقه بسته تحت تأثیر قرار خواهد گرفت و نیاز به تحلیل دارد. علاوه بر این، میتوان یک نرمکننده فرمان جدید برای یک سیستم خاص طراحی کرد. انواع مختلف طرحهای کنترلی که در این مقاله بررسی شدهاند، ممکن است تمام روشهای کنترل ترکیبی موجود را پوشش نداده باشند.
7. نتیجهگیری
این مقاله بیشتر تحقیقات انجامشده در سالهای 2000 تا 2016 را که به روشهای کنترل سیستمهای جرثقیل مربوط میشود، سازماندهی و خلاصه کرده است. از آنجایی که جرثقیلها در صنایع بهطور گستردهای مورد استفاده قرار میگیرند و با مسائل چالشانگیز کنترلی زیادی روبهرو هستند، بسیاری از محققان الگوریتمهای کنترلی مختلفی را پیشنهاد داده و به اجرا درآوردهاند، بهویژه در دستیابی به موقعیتیابی دقیق محموله و کاهش زوایای نوسان بار در جرثقیل. این مقاله مروری به امید ترغیب و ایجاد ایدههایی برای محققان جدید تهیه شده که میتواند طرحهای موجود را به سمت ایجاد استراتژیهای کنترلی مؤثرتر برای سیستمهای مختلف جرثقیل ارتقاء دهد و بهبود بخشد.


دیدگاه خود را بنویسید