 09111439770
09111439770

تأثیرات پارامترهای متغیر با زمان و اختلالات خارجی بر یک سیستم انعطافپذیر میتواند به شدت عملکرد کنترل را کاهش دهد و منجر به لرزشها و نوسانات بیش از حد شود.برای یک جرثقیل سقفی، نوسان میتواند در صورت وقوع همزمان هر دو عامل حتی بدتر شود. این مقاله یک رویکرد کنترل نوسان نوین برای جرثقیل سقفی کمعملکرد که بار را همزمان بالا میبرد و تحت تأثیر اختلالات خارجی قرار دارد، پیشنهاد میکند. طرح پیشنهادی بر اساس یک شکلدهنده پیشبینیکننده با اندازه واحد و کنترل بازخورد تطبیقی طراحی شده است که بهطور مؤثری نوسان بار را برای مقابله با هر دو اثر کاهش میدهد. علاوه بر این، پارامترهای کنترل میتوانند بهصورت آنلاین و در زمان واقعی بهروزرسانی شوند تا بهطور تدریجی نوسان بار را کاهش دهند. برای ارزیابی اثربخشی روش پیشنهادی، آزمایشهایی با باربرداری همزمان و اختلالات خارجی شامل شرایط اولیه غیرصفر، اختلال مداوم (باد) و اختلال آنی انجام شده است. کنترلکننده توسعهیافته تحت تمامی شرایط آزمایش، مقاومت بالاتری را با کاهش نوسانهای قابل توجه حداقل ۴۵٪ و ۶۹٪ در پاسخهای نوسان کلی و باقیمانده بهدست میآورد، در مقایسه با روش کنترل دیگر. انتظار میرود که روش پیشنهادی بهعنوان یک کنترلکننده ضد نوسان برای جرثقیلهای مختلف تحت تأثیر اختلال و باربرداری همزمان، بسیار مفید باشد.
معرفی
جرثقیلها خدمات حمل و نقل بارهای سنگین را ارائه میدهند که در بخشهای مختلفی از جمله ساخت و ساز، کارخانهها و صنایع دریایی در سراسر جهان بهطور گستردهای مورد استفاده قرار میگیرند. با این حال، به دلیل ساختار انعطافپذیر آن، ممکن است به علت عدم کفایت اپراتور انسانی در کنترل جرثقیل و وجود اختلالات غیرمنتظره خارجی، نوسانهای بیش از حدی را متحمل شود. علاوه بر این، بلند کردن بار که عملی حیاتی در عملکرد جرثقیل است، ممکن است به نوسان، پرش و پیچیدن بیشتر بار منجر شود. ازاینرو، طراحی کنترلکنندههای کارآمد که بتوانند نوسانهای اضافی ناشی از این عوامل را از بین ببرند، به منظور دستیابی به عملکرد سریع، محیط کاری ایمن و جلوگیری از آسیب به کیفیت بار و تأسیسات همجوار، بسیار حیاتی است. الگوریتمهای کنترل لرزش متنوعی برای سیستمهای جرثقیل بهطور گستردهای برای سیستمهای جرثقیل تک پاندولی، سیستمهای جرثقیل دو پاندولی و سیستمهای جرثقیل دوتایی طراحی شده است. بهعلاوه، انواع مختلفی از کنترلکنندهها شامل کنترل پیشخور و بازخورد برای سیستمهای جرثقیل بررسی شده است.
شکلدهی ورودی یک تکنیک کنترل پیشداورانه است که به طور گستردهای برای کاهش نوسانات و لرزشهای ناشی از سیستمهای انعطافپذیر استفاده میشود. یک شکلدهی که بتواند به طور مؤثر نوسانات را از بین ببرد و در عین حال پاسخ سریعی با مدت زمان کوتاهتری ارائه دهد، برای سیستمهای کنترل جرثقیل مطلوب است. یکی از شکلدهیهایی که میتواند این معیارها را برآورده کند، به نام شکلدهی بدون لرزش با دامنه واحد (UMZV) شناخته میشود که شبیه یک سیستم نوسانی با عملگر محدود است. در عملیات جرثقیل، تغییر طول کابل در حین بالا بردن بار و استفاده از جرمهای مختلف بار، فرکانس طبیعی و نسبت میراگر سیستم را تغییر میدهد. از آنجا که طراحی شکلدهی به شدت به این پارامترها وابسته است، عملکرد شکلدهی بر اساس پارامترهای ثابت سیستم ضعیف بوده و قادر به مدیریت اثرات این تغییرات نیست.
برای مقابله با این مشکل، اخیراً یک شکلدهنده پیشبینیگر UMZV با استفاده از رویکرد شبکه عصبی (NNUMZV) پیشنهاد شده است . با استفاده از NNUMZV، پارامترهای شکلدهنده میتوانند بهصورت آنی بهروزرسانی شوند و تغییرات در جرم بار و طول کابل در نظر گرفته شود تا طراحی دقیقی از شکلدهنده حاصل شود. با این حال، زمانی که بار به دلیل وجود اختلالات خارجی دچار نوسان قابل توجهی میشود، عملکرد جرثقیل به چالش کشیده میشود. این موارد شامل اثرات شرایط اولیه غیرصفر ، اختلال ناشی از باد و چندین اختلال خارجی دیگر است که برای سیستمهای جرثقیل مورد توجه قرار گرفتهاند. در نتیجه، عملکرد NNUMZV تمایل به کاهش دارد که نشاندهنده ناتوانی آن در مدیریت این اختلالات است. بهتازگی، یک کنترل robust پیادهسازی شده است چرا که میتواند بهطور مؤثری اثرات اختلالات را برای جرثقیل ، سیستمهای خودرو و موتورها DC مدیریت کند.
چندین تحقیق در زمینه کنترل نوسان بار در جرثقیلها با لحاظ کردن بالا بردن بار و اختلالات گزارش شده است. این تحقیقات شامل کنترلکنندههای پیشخور، پسخور و ترکیبی از این دو دسته بودند. در میان کنترلر ترکیبی، یک کنترلر تناسبی، انتگرالی و مشتقگیر محسوب میشود (PIDPD) و همچنین یک کنترلر PID بهینه به عنوان کنترل نوسان در سیستم جرثقیل دروازهای پیشنهاد شدهاند. با این حال، این طرحهای کنترلی تنها به حالتی با طول کابل متغیر توجه داشتند. همچنین یک کنترل ترکیبی که از طرحهای پسخور و پیشخور استفاده میکرد به عنوان کنترل ضد نوسان برای از بین بردن نوسانات بیش از حد ناشی از مزاحمتهای خارجی طراحی شد. اما کنترل پسخور به طور قاطعانه به کاهش نوسان طراحی نشده بود تا از حرکات غیرمنتظرهای که ممکن است اپراتور انسانی را غافلگیر کند، جلوگیری شود. طرحهای کنترلی متعددی برای مقابله با تأثیرات بالا بردن بار در انواع مختلف جرثقیلها طراحی شده است. به همین ترتیب، طرحهای کنترلی برای پاسخگویی به هر دو تأثیر مزاحمتهای خارجی و اثرات بالا بردن بار نیز توسعه یافته است. با این حال، مشخص شد که بیشتر تحقیقات این دو عامل را به طور جداگانه بررسی کردهاند. لازم به ذکر است که چالش کنترل جرثقیل در شرایطی که هر دو اثر به طور همزمان وجود دارد، افزایش مییابد.
با انگیزه برای غلبه بر این مسئله، این مقاله یک طرح کنترل نوآورانه برای کنترل کارآمد نوسان یک جرثقیل سقفی با بالابردن همزمان بار و وجود اختلالات خارجی پیشنهاد میدهد. تفاوت اصلی بین این مقاله و NNUMZV پیشبینی شده قبلی ، شامل ترکیب NNUMZV پیشبینی شده و کنترلکننده شبکه عصبی شبیه PID تطبیقی (APIDLNN) است. این طرح کنترل بر روی یک بستر آزمایشی جرثقیل سقفی پیادهسازی شده و تحت سه مورد آزمایشی شامل بالابردن بار، شرایط اولیه غیرصفر، اختلال مداوم (باد) و اختلال آنی آزمایش شده است. همچنین یک کنترلکننده مبتنی بر PID با PSO (PIDPSO) به عنوان یک روش مقایسهای طراحی شده است تا اثربخشی کنترلکننده پیشنهادی را از نظر نوسان کلی بار و نوسان باقیمانده تأیید کند. مزایای این مقاله را میتوان به شرح زیر خلاصه کرد:
1. طرح کنترل ترکیبی پیشنهادی شامل شکل دهنده NNUMZV است که می تواند پارامترهای شکل دهنده را پیش بینی و به روز کند.
زمان واقعی برای رسیدگی به بالا بردن بار محموله و APIDLNN که به صورت آنلاین بر اساس روش نزول گرادیان تطبیق داده شده اند.
برای رفع تأثیر اختلالات خارجی علاوه بر این، برای دستیابی به همگرایی سریعتر، مقدار اولیه وزن از
APIDLNN با استفاده از بهینه سازی ازدحام ذرات (PSO) بهینه شده است.
2. این مقاله در ساختار کنترل مربوط به ترکیب شکلدهی ورودی پیشبینی و کنترل APIDLNN برای سرکوب نوسان تحت اثر بالابردن بار و اختلال خارجی همزمان سهم داشته است. در کنترل جرثقیل، تنها کارهای محدودی در کنترل همزمان این دو اثر گزارش شده است، بهویژه در پیادهسازی واقعی که شامل انواع مختلف اختلالات است. یک سری آزمایشهای سختافزاری برای تأیید مؤثریت و استحکام کنترل نوسان پیشنهادی انجام شده است.
3.اکثر روش های کنترل موجود برای جرثقیل سقفی تحت یک فرض نوسان کوچک طراحی شده اند که
نیاز به خطی سازی مدل غیرخطی دارد. با این حال، در کاربرد واقعی، اثرات بالا بردن محموله و وجود
اغتشاشات خارجی مانند باد یا برخورد می تواند یک نوسان بزرگ ایجاد کند که تضمین عملکرد کنترل را دشوارتر میسازد. در این مقاله، کنترلکننده هیبریدی پیشنهادی بر اساس یک مدل غیرخطی با قابلیت یادگیری و ویژگیهای قوی مقاومت در برابر این تأثیرات طراحی شده است. تحلیل پایداری حلقه بسته کافی ارائه شده است که مؤثر بودن الگوریتم یادگیری و نرخهای یادگیری متنوع را نشان میدهد .
بقیه مقاله به شرح زیر سازماندهی شده است. بخش 2 مدل ریاضی 2 درجه آزادی را شرح می دهد.
جرثقیل سقفی با بالابر، و توضیحات سخت افزاری از بستر آزمایش جرثقیل سقفی. بخش 3 موارد قبلی را ارائه می دهد
کنترل کننده توسعه یافته است که نیاز به تقویت دارد در حالی که بخش 4 ساختار پیشنهادی را توضیح می دهد
NNUMZV-APIDLNN، همراه با جزئیات الگوریتم سازگاری. بخش 5 نتایج تجربی را نشان می دهد
برتری کنترل کننده پیشنهادی را نشان می دهد و در نهایت نکات پایانی در بخش 6 آورده شده است.
توضیحات مدل
شکل 1 یک مدل صفحه از یک جرثقیل سقفی دو بعدی (2-D) را نشان می دهد. فاصله r مسیری را نشان می دهد که ترولی از مبدا، تا نقطه تعلیق کابل می پیماید . l، m و h به ترتیب نشان دهنده طول کابل بالابر، جرم بار و زاویه نوسان هستند. u1 و u2 به ترتیب نیروهای محرکه برای حرکات r و l را نشان می دهند. معادلات
حرکت سیستم جرثقیل به صورت [39] ارائه شده است.
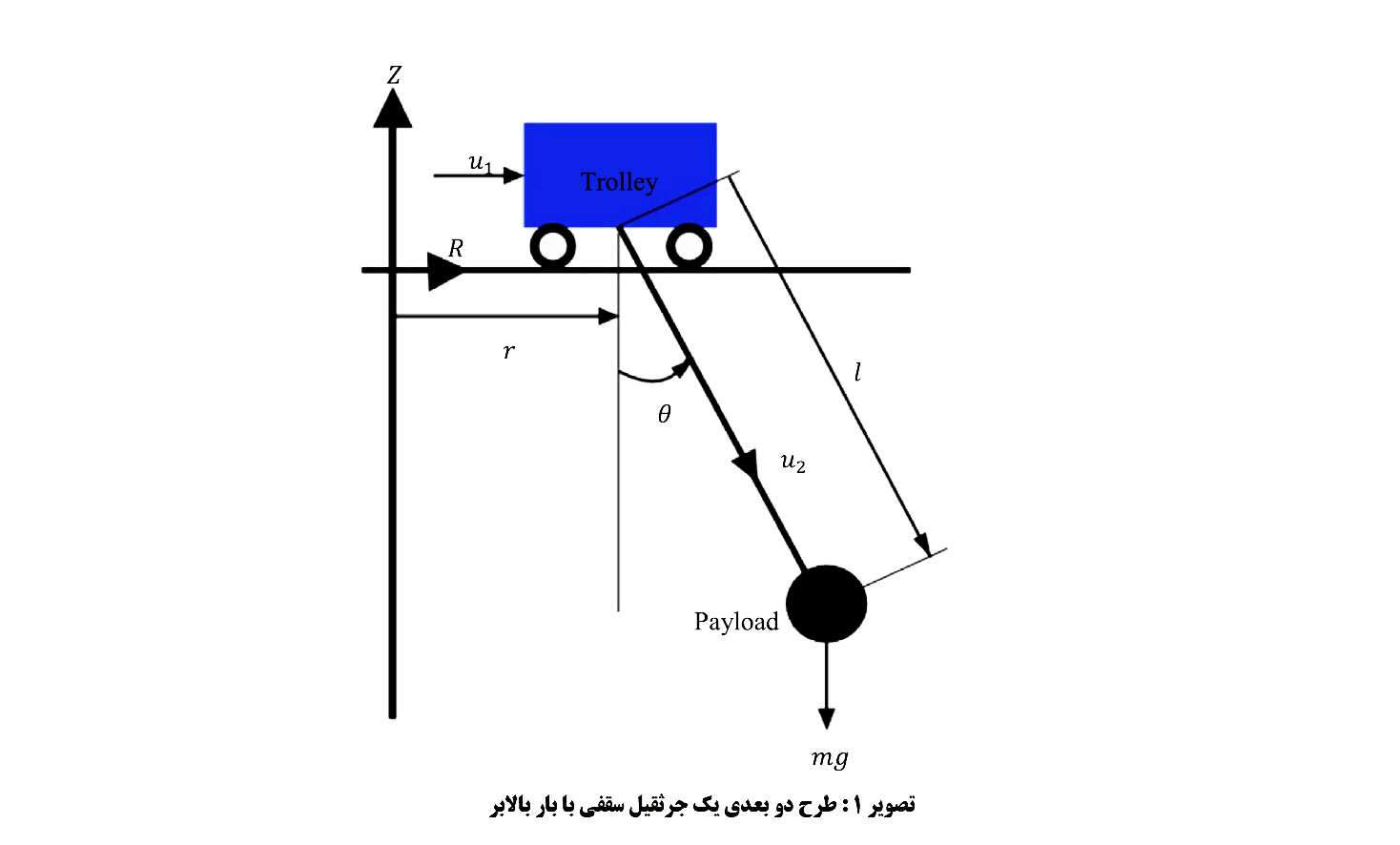

جایی که mr به اجزای متحرک جرم جرثقیل اشاره دارد که شامل جرمهای معادل بخشهای چرخان است، g شتاب جاذبه را نشان میدهد و bx و bl ضریبهای میرایی ویسکوز برای حرکات r و l به ترتیب هستند. جرم و سختی کابل و میرایی ویسکوز در نوسان بار نادیده گرفته شده و بار به عنوان یک جرم نقطهای فرض میشود.
3. شکلدهی ورودی لرزش صفر با اندازهگیری یکپارچگی (UMZV)
شکلدهی ورودی یک کنترل پیشخور مؤثر برای کاهش ارتعاشات یک سیستم انعطافپذیر است. با استفاده از شکلدهی ورودی، ارتعاش سیستم با هم convoluting سیگنال ورودی فرمان با یک توالی از ضربات که صفرهایی را در هر یک از قطبهای انعطافپذیر تولید میکند، کاهش مییابد [40]. علاوه بر استفاده از شکلدهندههای نوع صفر ارتعاش که شامل دامنههای مثبت ضربه هستند، میتوان یک شکلدهنده کوتاهتر را در صورت در نظر گرفتن دامنههای منفی ضربه به دست آورد [11،41]. دامنههای ضربه محدود به ۱ یا -۱ هستند تا یک فرمان بهینه زمانی حاصل شود. یکی از شکلدهندههای ورودی منفی، UMZV است که به صورت زیر تعریف میشود.
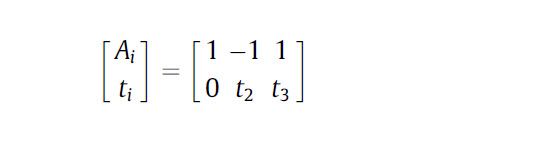
جایی که Ai و ti به ترتیب به معنی دامنه و زمان وقوع تکانه هستند. ti میتواند به عنوان تعریف شود.
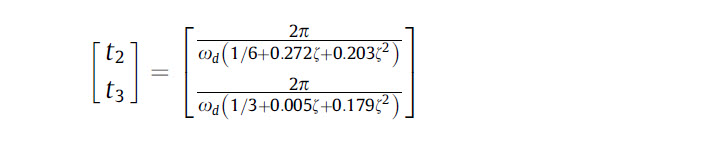
جایی که xd برابر با xn ضربدر جذر (1 منهای f2) است. xn و f به ترتیب بیانگر فرکانس طبیعی و نسبت میرایی سیستم هستند. از آنجایی که یک شکلداده معمولی بر اساس یک سیستم خطی طراحی شده است، عملکرد شکلداده در یک سیستم غیرخطی معمولاً کاهش مییابد. اخیراً برای مقابله با غیرخطیها و تغییرات در فرکانسهای طبیعی و نسبت میرایی، یک شبکه عصبی مبتنی بر این موضوع توسعه یافته است.
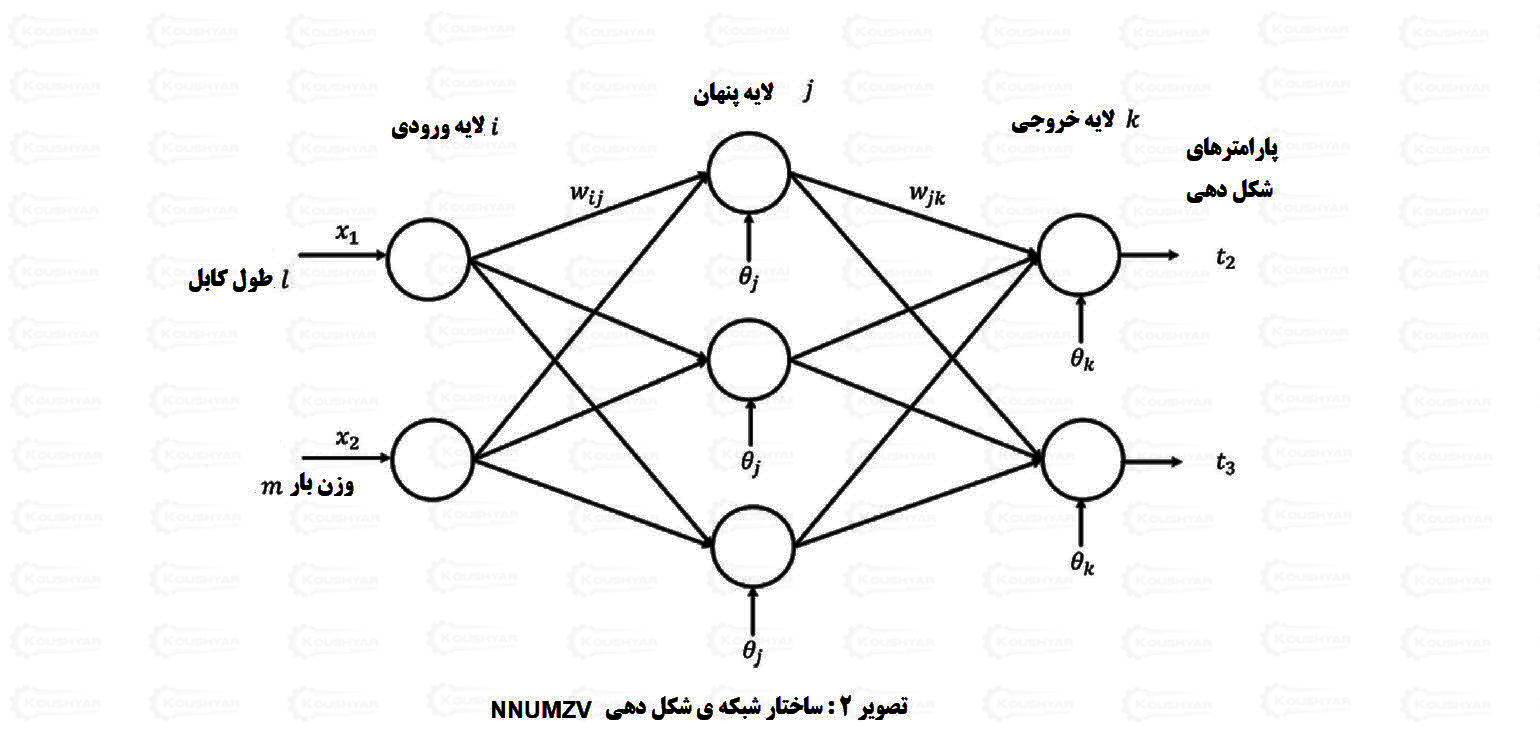
شکلدهنده UMZV (NNUMZV) پیشنهاد شد. در این روش، پارامترهای بهینه شکلدهنده با استفاده از شبکه عصبی (NN) بهدست آمدند که تحت تأثیر طولهای متفاوت کابل به دلیل بالا بردن بار و تغییرات در جرم بار قرار داشتند، همانطور که در شکل 2 نشان داده شده است. ساختار شبکه عصبی استفاده شده در شکل 2، نمایانگر یک ساختار ساده از شبکه عصبی پیشرو با سه لایه است زیرا این ساختار برای پیشبینی دقیق پارامترهای شکلدهنده با پیچیدگی محاسباتی کمتر مناسب است. با این حال، سایر انواع شبکههای عصبی نیز میتوانند برای پیشبینی پارامترهای شکلدهنده به کار گرفته شوند.
توضیحات دقیقی درباره کاربرد شبکههای عصبی (NN) در طراحی یک شکلدهنده UMZV در زمان واقعی در [7] موجود است. با این حال، طرح کنترل قادر به مدیریت نوسانات بار به دلیل اختلالات خارجی که در سناریوهای عملیاتی صنعتی رایج است، نبود. این مقاله به دنبال بهبود کار [7] است تا همزمان با جابجایی بار و اختلالات خارجی، با پیشنهاد یک ساختار کنترل که در بخش بعدی مورد بحث قرار میگیرد، اقدام کند.
4. الگوریتم NNUMZV-APIDLNN
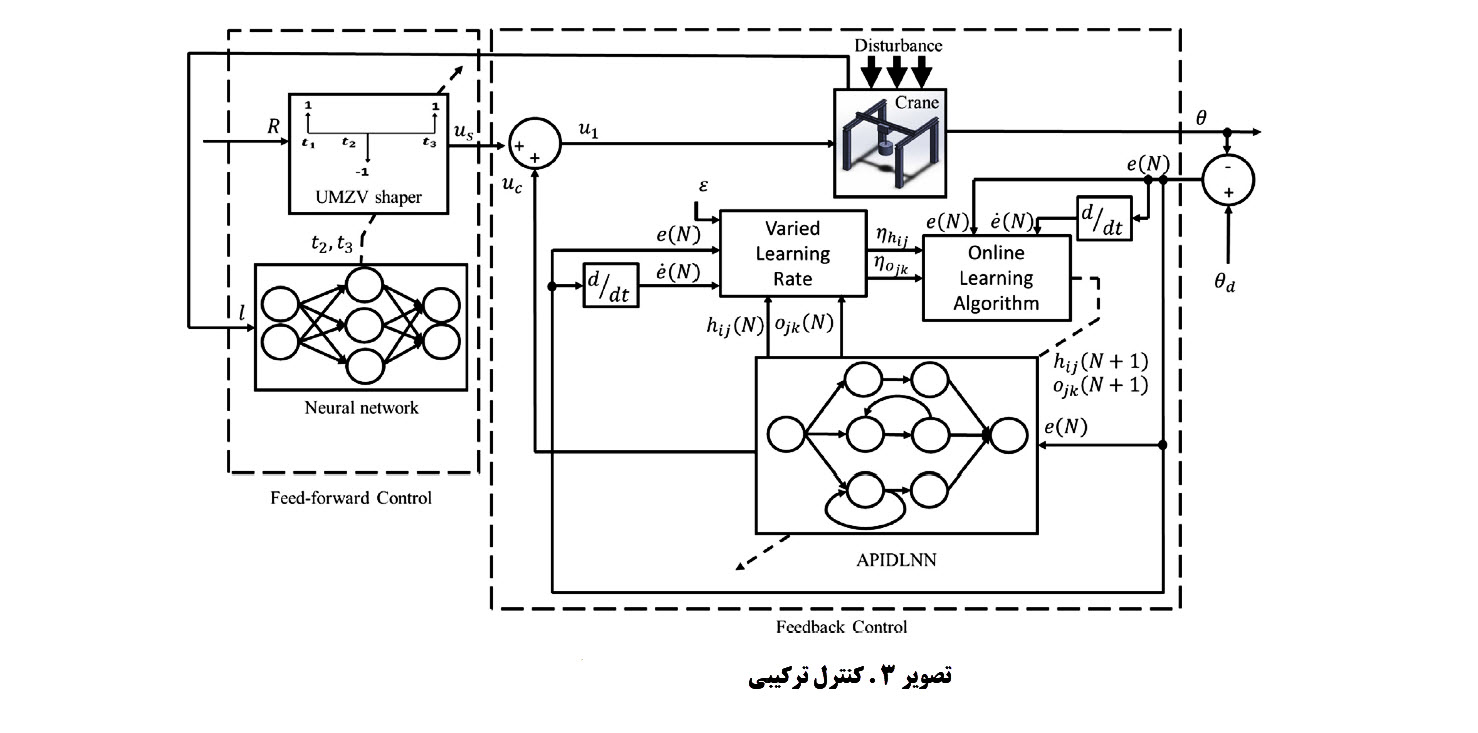
در این کار، کنترل مؤثر تابخوردن بر اساس شپر NNUMZV و APIDLNN تحت بارگذاری همزمان و چند نوع اختلال خارجی طراحی شده است. APIDLNN هم سادگی کنترل PID و هم قابلیت یادگیری خودکار شبکههای عصبی (NN) را ارائه میدهد. شکل ۳ ساختار کنترلی پیشنهادی را نشان میدهد که در آن R، h، hd، uc، us، u1 و e به ترتیب نمایانگر سیگنال ورودی، زاویه واقعی تابخوردن، زاویه تابخوردن موردنظر، سیگنال کنترل APIDLNN، سیگنال شکلدهی NNUMZV، ورودی کنترل و خطای تابخوردن هستند. ساختار کنترلی را میتوان بهعنوان ترکیبی از کنترلکنندههای پیشرو و بازخوردی مشاهده کرد که با خطوط نقطهچین در شکل ۳ نشان داده شده است.
بر اساس طول کابل اندازهگیری شده، شکلدهنده NNUMZV پارامترهای بهینهای را برای مقابله با نوسانات بار ناشی از بالابردن بار تعیین میکند. این امر منجر به ورودی شکلدار u1 میشود که به سیستم اعمال میگردد. همزمان، نوسانات واقعی بار که تحت تأثیر اختلالات خارجی نیز قرار دارد، با استفاده از APIDLNN پردازش شده و به سیستم بازخورد داده میشود. در این کار، از بازخورد مثبت استفاده شده است، چرا که این روش بهطور موفقیتآمیزی در [22,23] برای کنترل جرثقیلها پیادهسازی شده است.
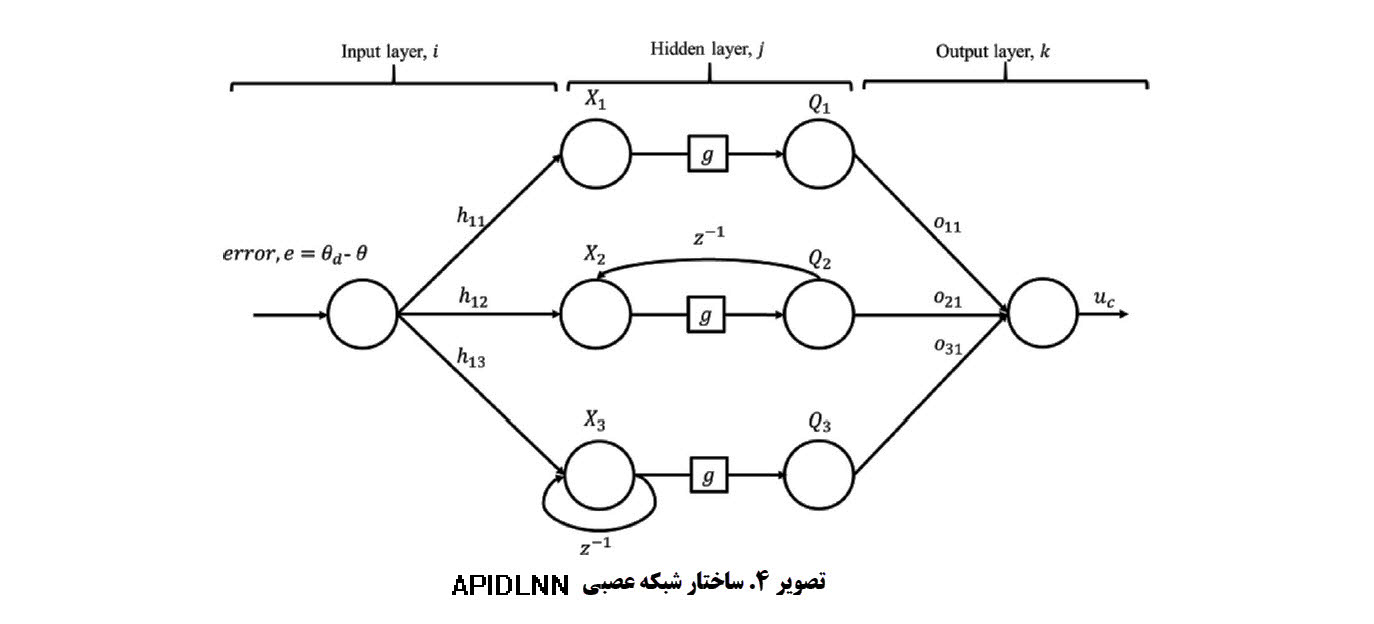
شکل ۴ ساختار شبکه APIDLNN را که در این مقاله به کار گرفته شده است، نشان میدهد. این شبکه شامل سه لایه به نامهای لایه ورودی (i)، لایه مخفی (j) و لایه خروجی (k) است. پارامترهای hij و ojk به ترتیب نمایانگر وزنها بین لایههای ورودی و مخفی و همچنین وزنها بین لایههای مخفی و خروجی هستند. لایه ورودی شامل یک گره ورودی است که سیگنال خطا، e را دریافت کرده و به طور مستقیم به نودهای جمع وزندار Xj (j = 1, …, nj) در لایه مخفی ارسال میکند. سایر نودهای موجود در لایه مخفی نماینده نود تناسبی Q1، نود انتگرالی Q2 و نود تفاضلی Q3 هستند و z^(-1) یک عملگر تأخیر واحد محسوب میشود. یک نود خروجی در لایه خروجی به طور مستقیم سیگنال کنترل بازخورد u2 را به سیستم ارسال خواهد کرد. خروجیهای لایه مخفی که به وسیله نورونهای Q1، Q2 و Q3 ارائه میشوند، عبارتند از:

جاییکه N تعداد تکرار و خطا است ،
تابع g(x) داده شده است :
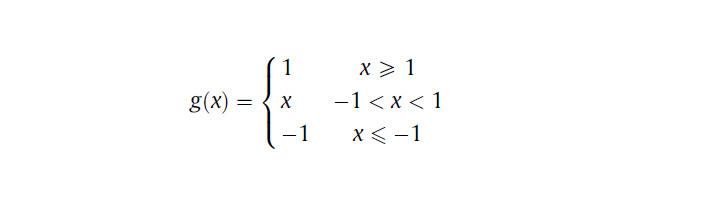
مرزهای بالا و پایین تابع g(x) تضمین میکنند که سیگنال بهطور غیرقابل کنترل در هنگام انتشار از یک لایه به لایه دیگر رشد نکند. خروجی نهایی APIDLNN را میتوان به صورت زیر بیان کرد.

جایی که nj برابر با ۳ است، تعداد نورونها در لایه پنهان میباشد. بر اساس معادلات (۶) تا (۱۰)، Q2(N) میتواند به صورت زیر نوشته شود.

که در آن معادله (11) رابطه انتگرالی وجود دارد و Q2(N) به عنوان یک گره انتگرالی شناخته میشود. از سوی دیگر، Q3 (N) میتواند به صورت زیر نوشته شود:

در معادله (12) رابطهای بین تفاضل و Q3(N) وجود دارد که به عنوان یک گره تفاضلی شناخته میشود.
4.1.وزنگذاری اولیه
این بخش به بهینهسازی وزنهای اولیه APIDLNN (hij و ojk) با استفاده از PSO، قبل از پیادهسازی در زمان واقعی میپردازد. به جای فرض کردن آنها بهطور تصادفی، این وزنهای اولیه بهینه بهصورت آفلاین بهدست آمدهاند تا همگرایی سریعتری از وزنهای واقعی در هنگام سازگاری در زمان واقعی APIDLNN تضمین شود. فرض کردن آنها بهطور تصادفی یا استفاده از مقادیر اولیه مختلف میتواند بر کارایی فرآیند آموزش APIDLNN در هنگام سازگاری آنلاین تأثیر بگذارد و منجر به کاهش نارضایتی در نوسانات شود. با بهینهسازی این مقادیر، جلسه آموزشی در حین سازگاری در زمان واقعی میتواند کاهش یابد، زیرا نقطه شروع بهینهسازی بسیار نزدیک به حداقل جهانی است.
متغیرهای کنترلی الگوریتم PSO به عنوان وزنهای شبکه تعیین شدند که به بردار موقعیت ذره iام در فضای جستجو مربوط میشود. دامنه هر متغیر کنترلی بین [-1, 1] تنظیم شد و اندازه جمعیت 40 نفر در نظر گرفته شد. هر ذره میتواند به عنوان یک نقطه در فضای D بعدی در نظر گرفته شود و موقعیت ذره iام، xi، بر اساس بهروزرسانی سرعت داده شده بهروز خواهد شد تا در نهایت به یک راهحل بهینه در ناحیه فضای جستجو دست یابد. دو بهترین مقدار در بین جمعیت ارزیابی شدند که به آنها بهترین شخصی (pb) و بهترین جهانی (gb) گفته میشود. سرعت ذره iام به صورت زیر محاسبه میشود.

جایی که d تعلق دارد به بازه ی [1,D] و i متعلق به بازه ی [1,S] . s و t به ترتیب تعداد ذرات و شماره تکرار جاری هستند. ضرایب شتاب، c1 و c2 به مقدار 1.5 تنظیم شدند و اعداد تصادفی، r1 و r2 بین ½0 و 1 اختصاص یافتند. وزن اینرسی، x که کنترلکننده مومنتوم و قابلیت ذرات در زمینه جستجو و بهرهبرداری برای یافتن یک نقطه بهینه خوب است، به صورت زیر داده میشود.

که xmax و xmin به ترتیب مقادیر حداکثر و حداقل وزن لختی هستند که به ترتیب 0.9 و 0.4 تنظیم شدهاند. tmax نیز حداکثر تعداد تکرارهاست. تمام ذرات بر اساس تابع تناسب، J ارزیابی شدند که هدف آن کاهش زاویه نوسان بار است و بر مبنای میانگین مربع خطا (MSE) تعریف شده است.

زمان شبیهسازی T است. در هر تکرار، مقدار تناسب هر ذره محاسبه شد تا در نهایت وزنهای اولیه بهینه یافت شود. فرآیند بهینهسازی با استفاده از شبیهسازی در متلب انجام شد و نتایج در جدول 1 نشان داده شده است.
4.2. الگوریتم یادگیری آنلاین
الگوریتم یادگیری آنلاین در شکل ۳ از روش نزول گرادیان برای تنظیم وزنهای شبکه استفاده کرده است. تابع هزینه E به صورت زیر تعریف میشود،

وزنهای بهروزرسانیشده از طریق حداقلسازی تابع هزینه، E، به دست میآیند. در لایه خروجی، عبارت خطا که باید منتشر شود، به این صورت محاسبه میشود:

جدول ۱
گامهای اولیه بهینهسازی شده APIDLNN.

4.3 تحلیل همگرایی
برای حلقه بازخورد، معادله نشان می دهد که خطای خروجی بین پاسخ های نوسان بار مورد نظر و واقعی، e
به تدریج به صفر همگرا می شود و می توان از ثبات کنترل کننده بازخورد اطمینان حاصل کرد. به عنوان فیدفورارد و
کنترل کننده های حلقه بسته به طور مستقل طراحی شده اند، کنترل پیشخور بر پایداری حلقه بسته تأثیر نمی گذارد.
سیستم علاوه بر این، شکل دهی ورودی خارج از حلقه بازخورد همانطور که در شکل 3 نشان داده شده طراحی شده است و بنابراین، هیچ تاثیری بر روی آن ندارد.
مقادیر ویژه سیستم حلقه بسته زیرا به سادگی سیگنال فرمان را به سیستم تغییر می دهد. از این رو، ثبات از
سیستم کلی را می توان تضمین کرد. پیاده سازی شکل دهی ورودی در حلقه بازخورد که می تواند بر
ثبات حلقه بسته در مقاله ای مورد بحث قرار گرفت.
پارامترهای نرخ یادگیری متنوع در معادلات (29) و (30) می توانند همگرایی خطای خروجی را بر اساس تضمین کنند
تجزیه و تحلیل تابع لیاپانوف گسسته برای ایجاد یک آموزش موثر برای APIDLNN. نتایج تجربی ارائه شده است
در بخش اثربخشی مدل یادگیری آنلاین APIDLNN بر اساس الگوریتم انطباق و متنوع نشان داده شد.
5. اجرا و نتایج
شکل 5a یک آزمایشگاه تست جرثقیل سقفی را که برای آزمایشها استفاده شده است، نشان میدهد. شکلهای 5b و 5c نیز یک دمنده باد GBL800E تولید شده توسط شرکت BOSCH را نشان میدهند که برای ایجاد باد به عنوان یک اختلال خارجی استفاده شده و نیروی باد با استفاده از یک آنموتر دیجیتال GM816 اندازهگیری شده است. این جرثقیل دارای یک مکانیزم حرکتی است که توسط یک موتور DC هدایت میشود و سه انکودر اندازهگیری با دقت 4096 پالس در هر دور برای اندازهگیری موقعیت ترولی، طول کابل و زاویه بار استفاده میشود. زاویه بار با دقت 0.0015 رادیان قابل اندازهگیری است. پیادهسازی در زمان واقعی شامل یک رایانه شخصی مبتنی بر پنتیوم و یک الگوریتم کنترل طراحی شده با استفاده از MATLAB/Simulink است. زمان نمونهبرداری تنظیم شده 0.01 ثانیه بود. جدول 2 پارامترهای سیستم آزمایشگاه تست جرثقیل سقفی را ارائه میدهد.
چندین آزمایش شامل بالابری همزمان و اختلالات خارجی انجام شد تا عملکرد زمان واقعی طرح کنترل پیشنهادی تأیید شود. شکل 6 سیگنال ورودی R(t) را که برای حرکت کالسکه اعمال شده، نشان میدهد. به دلیل محدودیتهای بستر آزمایش جرثقیل، بار از ارتفاع 0.17 متر به 0.59 متر بالا برده شد (شکل 7) که معادل 71% است.
ارتفاع جرثقیل. در حین جابجایی، اختلال با ضربه زدن فیزیکی به بار ایجاد شد و این اختلال تقریباً به همان شکل حفظ شد تا ثبات در آزمایشهای مختلف تأمین شود. علاوه بر این، اختلال باد مداوم با سرعت ثابت ۲۵ متر بر ثانیه اعمال شد.
برای انجام یک مطالعه جامع، سه حالت مربوط به جابجایی و اختلال بررسی شد:
- حالت ۱: بار در حین جابجایی، تحت تأثیر اختلالی قرار گرفت که بر روی جرم بار به وزن ۰.۷۴ کیلوگرم به صورت موازی با محور کالسکه در حین حرکت جرثقیل وارد شد.
- حالت ۲: یک حالت اولیه غیرصفر در نظر گرفته شد که در آن زاویه نوسان اولیه، h(0) برابر با ۶- درجه است. بهطور عملی، این حالتی است که در آن کالسکه و بار حملشده ابتدا بر روی یک محور همراستا نیستند.
- حالت ۳: بار در حین جابجایی، تحت تأثیر اختلال باد با سرعت ثابت ۲۵ متر بر ثانیه به طور مداوم قرار گرفت.
برای مقایسههای عملکرد، یک رویکرد PID مبتنی بر PSO نیز با شکلدهنده NNUMZV ترکیب شد همانطور که در شکل ۸ نشان داده شده و تحت تمام موارد آزمایشی پیادهسازی شد. با اتخاذ همان تکنیک برای بهینهسازی وزنهای اولیه APIDLNN، PSO برای تعیین ضرایب بهینه برای روش مقایسهای از طریق شبیهسازی در متلب استفاده شد. پارامترهای PSO مانند بروزرسانی سرعت ذره iام و وزن اینرسی بهعنوان معادلات (۱۳) تا (۱۵) تعیین شدند.
جدول ۲
پارامترهای سیستم.
پارامترهای سیستم | مقادیر
طول کابل بالابری، l | ۰.۱۷–۰.۵۹ متر
ثابت گرانش، g | ۹.۸ متر بر ثانیه مربع
میزان میرایی ویسکوز، bx | ۸۲ نیوتن ثانیه بر متر
میزان میرایی ویسکوز، bl | ۷۵ نیوتن ثانیه بر متر
جرم بار، m | ۰.۷۴ کیلوگرم
جرم واگن، mr | ۱.۱۵۵ کیلوگرم
ل. رامی و همکاران / سیستمهای مکانیکی و پردازش سیگنال xxx (xxxx) xxx
لطفاً ارجاع دهید.


دیدگاه خود را بنویسید